Spatial Glulam Structures
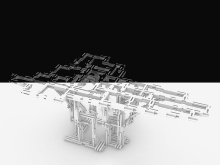
In this workshop, a selected group of international and interdisciplinary participants investigated novel potentials for wood architecture that arise at the intersection of computational design and mobile, platform-based robotic timber construction. The effective design of spatial timber structures is currently limited to transportation constraints of standardised, prefabricated mostly linear elements. An on-site robotic fabrication platform, allows the construction of timber structures that break free from these constraints. Based on the possibilities of such mobile robotic construction process we will explore novel design opportunities and new architectural typologies of three-dimensional, adaptive spatial glulam structures.
Participants learned to use exploratory computational design methods, structural topology-optimization tools, tools for the tectonically defined geometrical definition of building element assemblies and tools for integrated robotic simulation and subsequent robotic code generation. The workshop was split into three parts. First, participants were introduced into the topics of wood architecture and project- and platform based robotic timber construction. Second, in skill-up sessions the participants were then taught the digital tools for computational design and fabrication simulation. Last but not least, the core part of the workshop was then the development of individual design explorations in small groups with a focus on digital collaboration tools and the design exploration of the proposed building system in various contextual scenarios.
The workshop concluded with a comprehensive catalogue of design possibilities that arise from the proposed design methods and construction processes. In parallel the fabrication system was tested through the construction of a full-scale demonstrator at Tongji University. For the Final Review a panel of international guests joined us to discuss the workshops results.
In this workshop, a selected group of international and interdisciplinary participants investigated novel potentials for wood architecture that arise at the intersection of computational design and mobile, platform-based robotic timber construction. The effective design of spatial timber structures is currently limited to transportation constraints of standardised, prefabricated mostly linear elements. An on-site robotic fabrication platform, allows the construction of timber structures that break free from these constraints. Based on the possibilities of such mobile robotic construction process we will explore novel design opportunities and new architectural typologies of three-dimensional, adaptive spatial glulam structures.
Participants learned to use exploratory computational design methods, structural topology-optimization tools, tools for the tectonically defined geometrical definition of building element assemblies and tools for integrated robotic simulation and subsequent robotic code generation. The workshop was split into three parts. First, participants were introduced into the topics of wood architecture and project- and platform based robotic timber construction. Second, in skill-up sessions the participants were then taught the digital tools for computational design and fabrication simulation. Last but not least, the core part of the workshop was then the development of individual design explorations in small groups with a focus on digital collaboration tools and the design exploration of the proposed building system in various contextual scenarios.
The workshop concluded with a comprehensive catalogue of design possibilities that arise from the proposed design methods and construction processes. In parallel the fabrication system was tested through the construction of a full-scale demonstrator at Tongji University. For the Final Review a panel of international guests joined us to discuss the workshops results.
Participants learned to use exploratory computational design methods, structural topology-optimization tools, tools for the tectonically defined geometrical definition of building element assemblies and tools for integrated robotic simulation and subsequent robotic code generation. The workshop was split into three parts. First, participants were introduced into the topics of wood architecture and project- and platform based robotic timber construction. Second, in skill-up sessions the participants were then taught the digital tools for computational design and fabrication simulation. Last but not least, the core part of the workshop was then the development of individual design explorations in small groups with a focus on digital collaboration tools and the design exploration of the proposed building system in various contextual scenarios.
The workshop concluded with a comprehensive catalogue of design possibilities that arise from the proposed design methods and construction processes. In parallel the fabrication system was tested through the construction of a full-scale demonstrator at Tongji University. For the Final Review a panel of international guests joined us to discuss the workshops results.
ICD Institute for Computational Design and Construction
Tim Stark, Hans Jakob Wagner, Prof. Achim Menges
Tongji University
Chai Hua, Prof. Philip Yuan
Student Participants
Dan Liang, Tongbi Li, Wei Ye, Hanlin Dong, Chukwuemeka Nwosu, Yishi Li, Rison Prasad Karayil Thekkoot, Angelo Figliola, Shahe Gregorian, Deebak Tamilmani, Akash Vazirani, Dominik Reisach, Fabian Eidner, Shuo Feng, Desmond Leung, Jiaming Li, Abhishek Shinde, Chien-hua Huang
Dan Liang, Tongbi Li, Wei Ye, Hanlin Dong, Chukwuemeka Nwosu, Yishi Li, Rison Prasad Karayil Thekkoot, Angelo Figliola, Shahe Gregorian, Deebak Tamilmani, Akash Vazirani, Dominik Reisach, Fabian Eidner, Shuo Feng, Desmond Leung, Jiaming Li, Abhishek Shinde, Chien-hua Huang
Panel for Final Review
- Prof. Anna Lisa Meyboom, UBC Vancouver
- Judyta Cichocka, MIT / Parametric Support
- Prof. Xiang Wang, Tongji University
- Daria Kovaleva, ILEK University of Stuttgart
- Dylan Wood, ICD University of Stuttgart
- Ramtin Attar, Promise Robotics / Autodesk Research
- Arch. + Engineerin Team, GROPYUS AG
- Prof. Anna Lisa Meyboom, UBC Vancouver
- Judyta Cichocka, MIT / Parametric Support
- Prof. Xiang Wang, Tongji University
- Daria Kovaleva, ILEK University of Stuttgart
- Dylan Wood, ICD University of Stuttgart
- Ramtin Attar, Promise Robotics / Autodesk Research
- Arch. + Engineerin Team, GROPYUS AG