Project Gallery




{kind=link}
Robotic Softness - Behavioural Fabrication Process of a Woven Space
Robotic Softness: Behavioural Fabrication Process of a Woven Space explores the potential of behavioural fabrication systems in comparison with construction processes based on pure notation, where only what can be drawn and measured, can be built (Carpo, 2014). Behavioural fabrication strategies are not based on the “materialisation” of detailed blueprint drawings or digital models, but rather on the execution of specific tasks that unfold out of the interaction between the machine and the environment through a sensor-actuator feedback strategy.
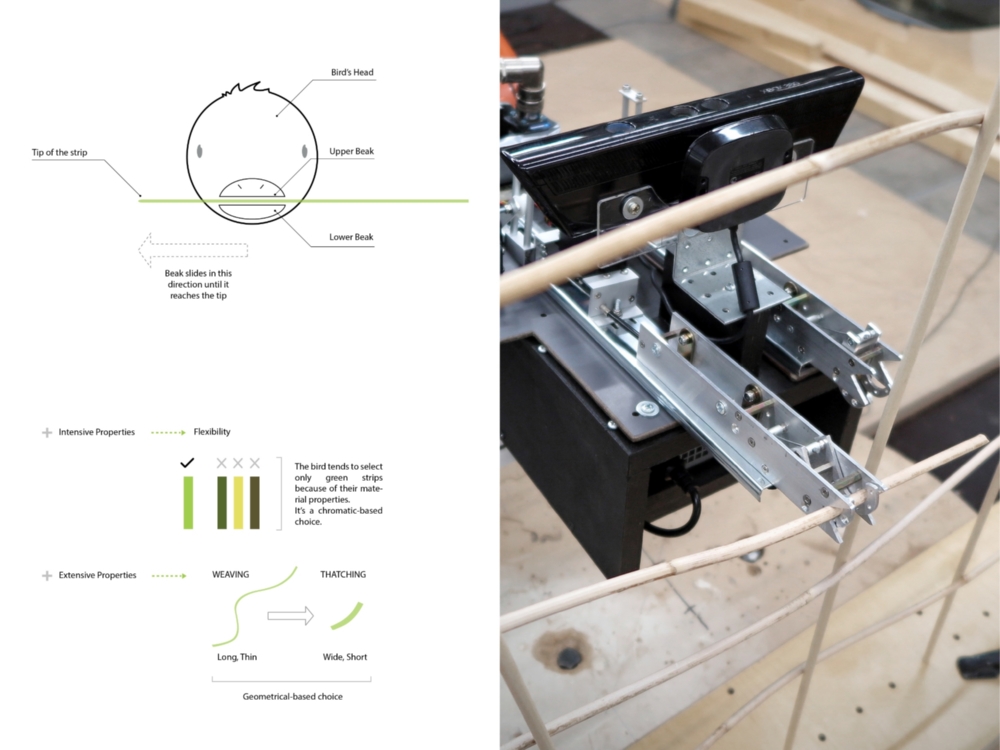
In order to challenge the conceptual framework posed by notational systems, the research focused on the design and production of three-dimensional robotically woven structures inspired by the behavioural construction logic used by a large family of birds called “weaverbirds” during the construction of their nest. These structures are not successful for specific properties of the material they are made of but rather for the behavioural logic that the bird follows to put them together, therefore the biomimetic research focused on the analysis of these set of procedures and construction strategies to subsequently transfer them within the robotic fabrication system.
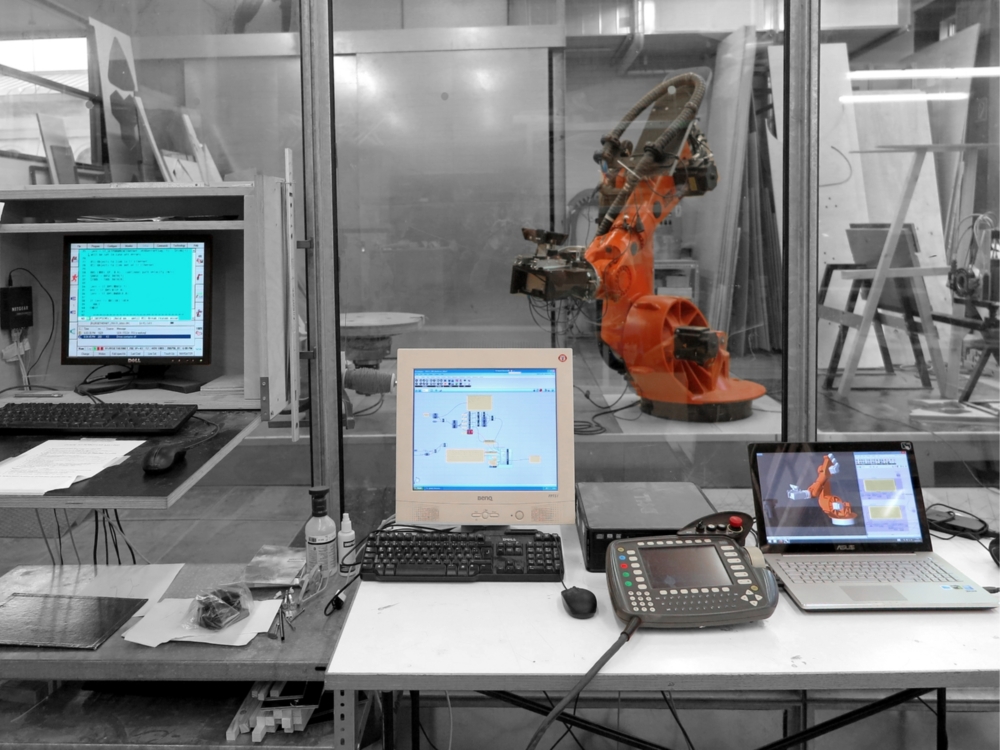
At the foundation of this research lies the idea of robotic fabrication processes not as linear procedures of materialisation but rather as “soft system”, according to the definition given by Sanford Kwinter, systems that are flexible, adaptable and evolving and rely on a dense network of active information and feedback loops (Kwinter,1993) . In this new paradigm, condensed in the idea of “Robotic Softness”, the design moment blurs with the fabrication one, while the “soft system” unfolds simultaneously on the physical and digital level relying completely on a real-time stream of sensor data. As written by Rodney Brooks, one of the father of behaviour-based robotics, the need of traditional symbolic representation fades entirely if we consider that the world is its own best model and it just needs to be sensed appropriately and often enough (Brooks, 1990).
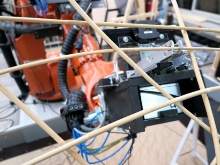
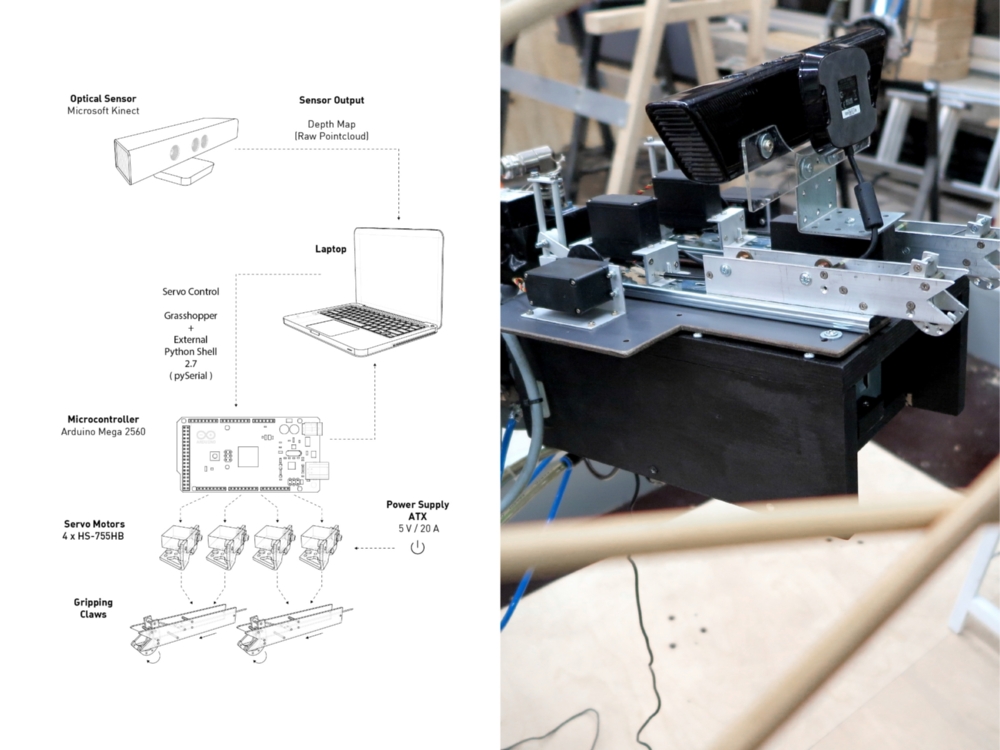
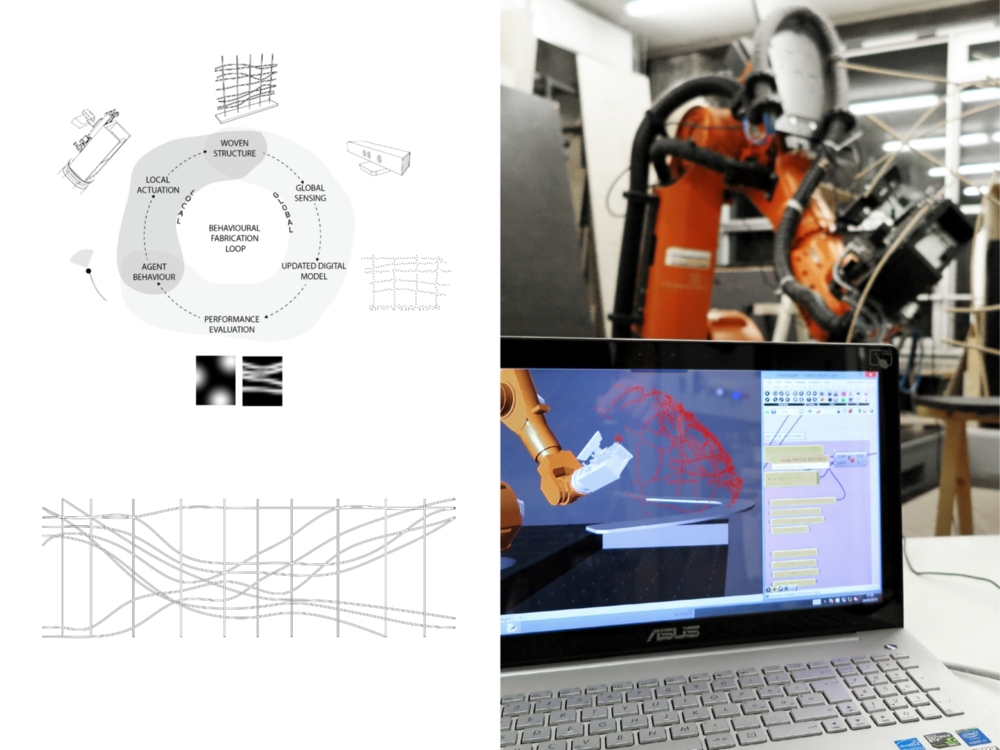
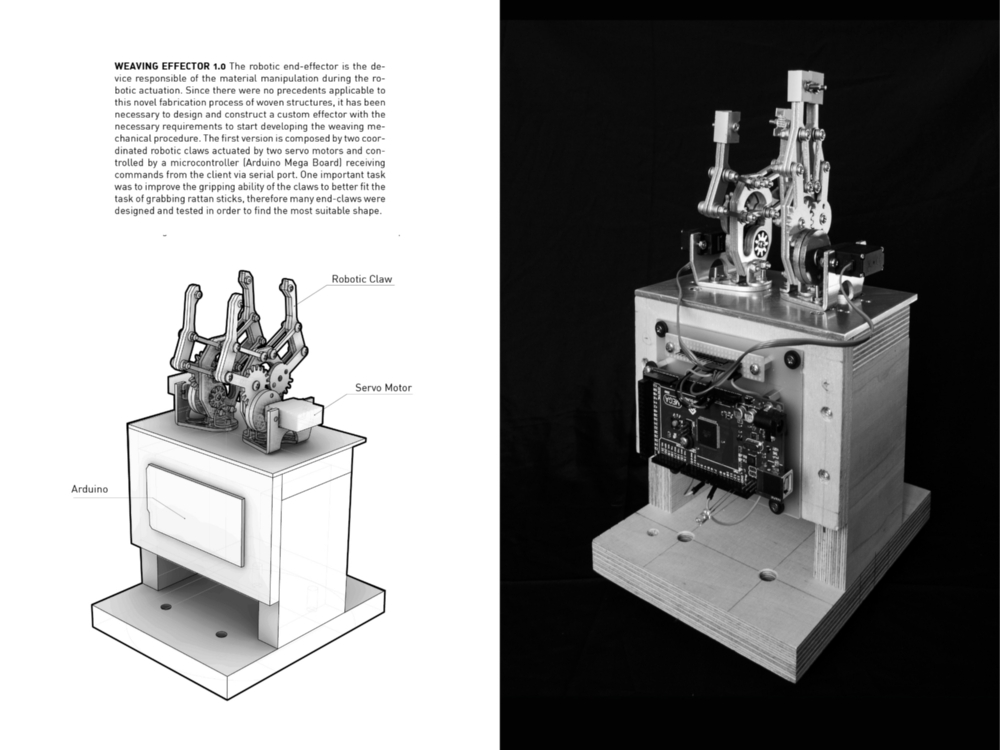
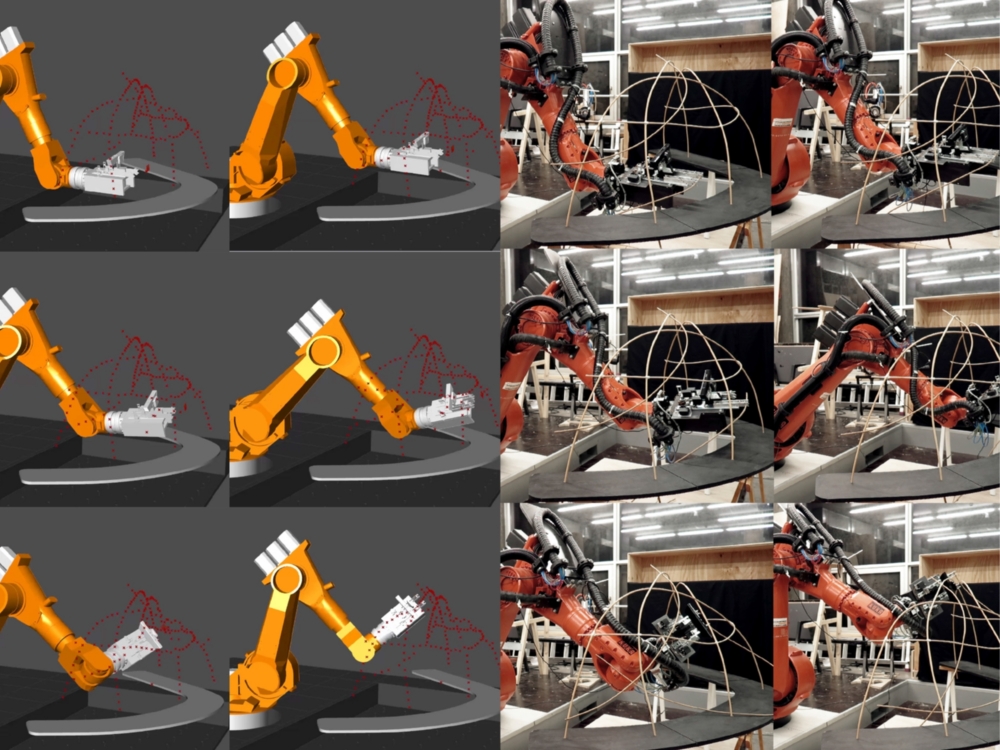
The research development led to the design of an integrative computational tool, composed by different parts such as an online agent-based control system, a custom weaving end-effector and integrated sensing strategy. The behavioural fabrication process is composed by two coordinated fabrication loops, one acting on a local level while the other on a global one, which unfold together in real-time and rely on the already mentioned dense network of sensor data. The woven structure that comes out of this process is not described in a model subsequently “materialised” in the fabrication stage but rather it emerges from a constant negotiation between different fabrication parameters, material properties, site conditions and design intentions expressed through specific performance criteria.
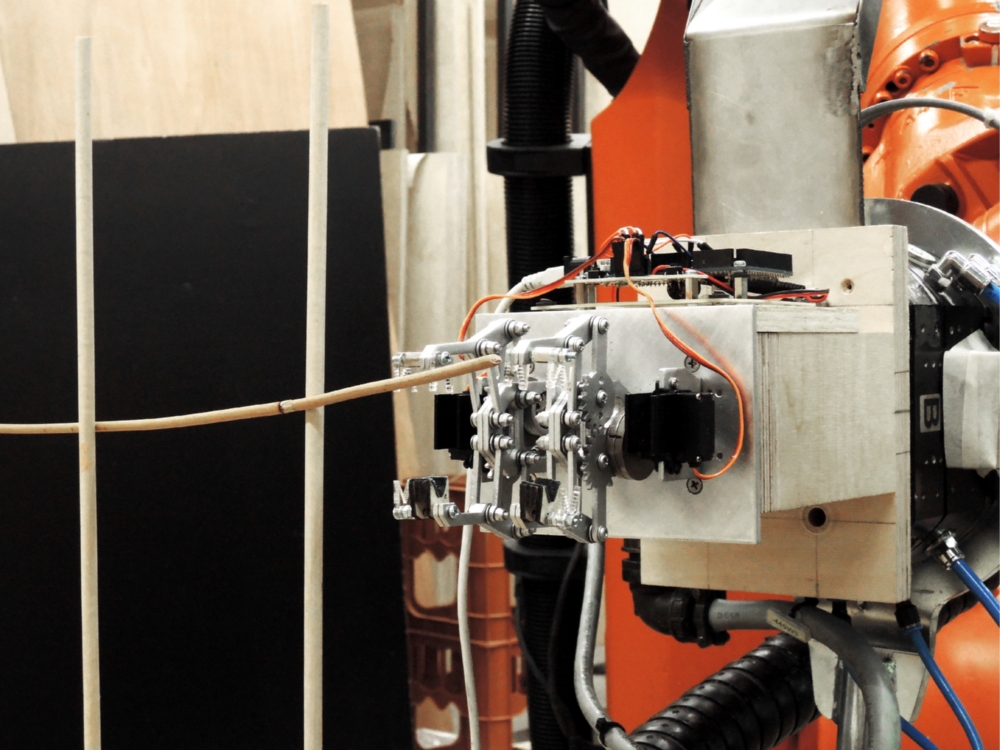
The local loop deals with the direct manipulation of the material with the weaving effector and its coordination, together with the procedure that links the agent-based system with the local robotic movements that defines the weaving logic. The sensor data gathered at this level with an optical 3D scanner are only related to a small portion of the woven mesh ahead of the effector’s weaving direction, where the next weaving sequence will happen.
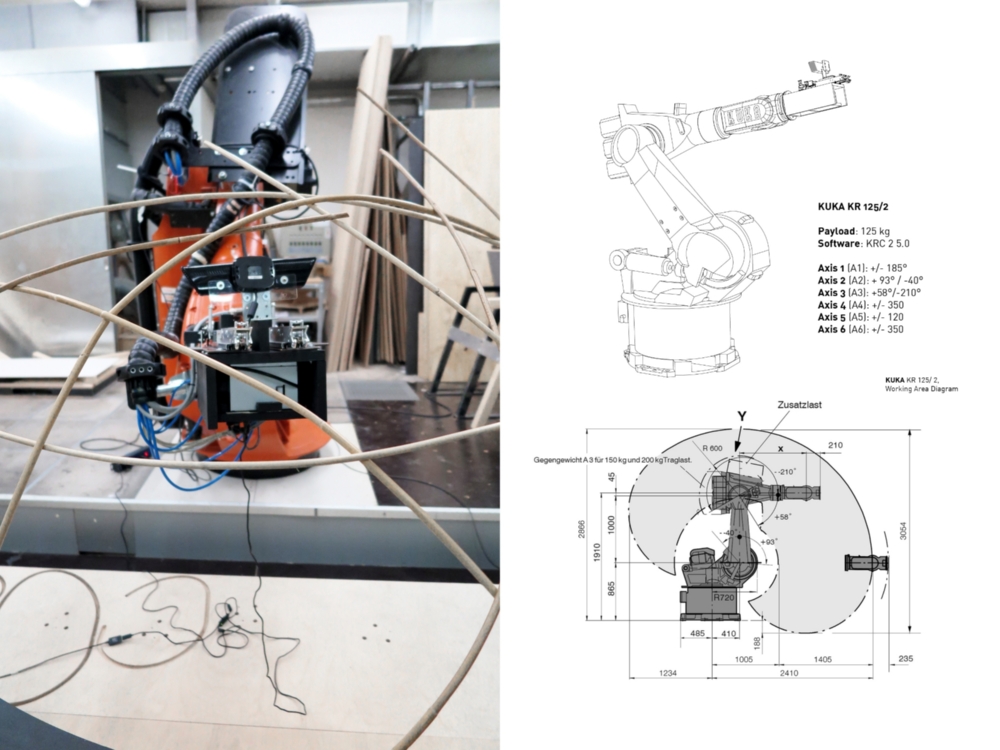
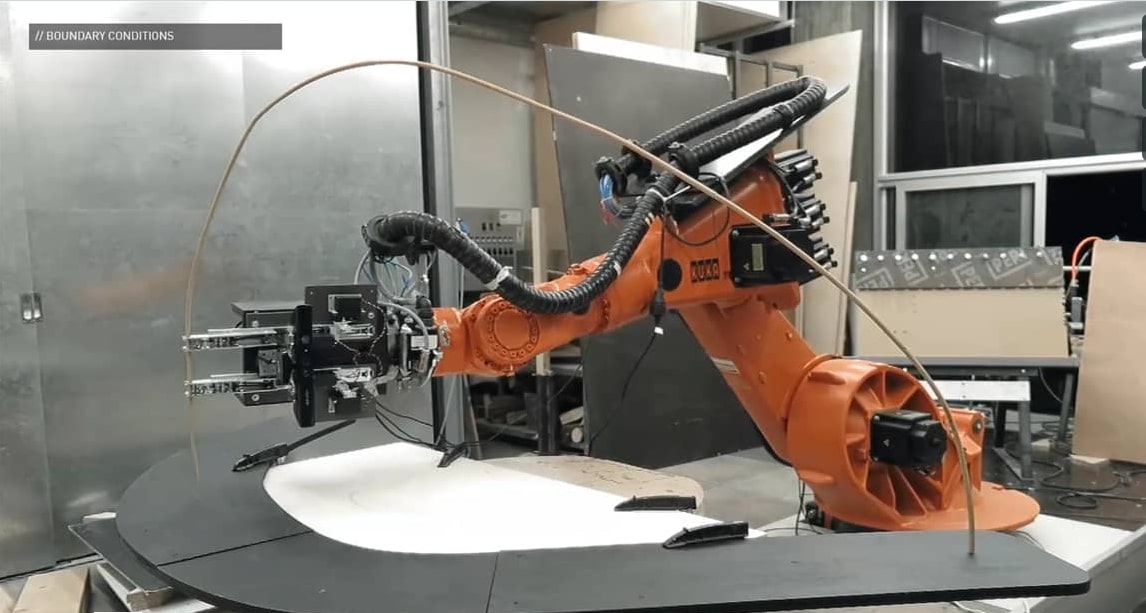
On the other hand, the global loop deals with the overall woven structure and the performance criteria that inform its shape and how the fabrication system relates to the site conditions. In order to translate these performance criteria, which act as loose guidelines, the system scans the whole structure and generates real-time mapping to drive the actuation and global level of the agent-based system. Design intentions are expressed through the definition of performance criteria parameters, which are constantly evaluated and adjusted in real-time. Furthermore, a major role is played by the definition of the boundary conditions and how the system adapts to the site conditions or create its own.
The research developed through a series of experiments that tested each time different aspects of the system, for instance the local and the global sensing, the adaptive reorientation or the performance-driven responsiveness. The research culminated in a final prototype that represented a moment of synthesis where the whole system was tested to produce a relatively complex woven structure emerging through the negotiations of all the previously tested components. In parallel with the physical prototyping, a digital exploration with the same integrative tool was undertaken in order to create a collection of possible spatial morphologies that showcased how much the interplay of different parameters could influence the final result and open the design process toward new possibilities.
ITECH M.Sc. Thesis Project 2015: Robotic Softness - Behavioural Fabrication Process of a Woven Space
Giulio Brugnaro
Thesis Advisers: Ehsan Baharlou, Lauren Vasey
Thesis Supervisor: Prof. Achim Menges
Second Supervisor: Prof. Jan Knippers
Robotic Softness: Behavioural Fabrication Process of a Woven Space explores the potential of behavioural fabrication systems in comparison with construction processes based on pure notation, where only what can be drawn and measured, can be built (Carpo, 2014). Behavioural fabrication strategies are not based on the “materialisation” of detailed blueprint drawings or digital models, but rather on the execution of specific tasks that unfold out of the interaction between the machine and the environment through a sensor-actuator feedback strategy.
In order to challenge the conceptual framework posed by notational systems, the research focused on the design and production of three-dimensional robotically woven structures inspired by the behavioural construction logic used by a large family of birds called “weaverbirds” during the construction of their nest. These structures are not successful for specific properties of the material they are made of but rather for the behavioural logic that the bird follows to put them together, therefore the biomimetic research focused on the analysis of these set of procedures and construction strategies to subsequently transfer them within the robotic fabrication system.
At the foundation of this research lies the idea of robotic fabrication processes not as linear procedures of materialisation but rather as “soft system”, according to the definition given by Sanford Kwinter, systems that are flexible, adaptable and evolving and rely on a dense network of active information and feedback loops (Kwinter,1993) . In this new paradigm, condensed in the idea of “Robotic Softness”, the design moment blurs with the fabrication one, while the “soft system” unfolds simultaneously on the physical and digital level relying completely on a real-time stream of sensor data. As written by Rodney Brooks, one of the father of behaviour-based robotics, the need of traditional symbolic representation fades entirely if we consider that the world is its own best model and it just needs to be sensed appropriately and often enough (Brooks, 1990).
The research development led to the design of an integrative computational tool, composed by different parts such as an online agent-based control system, a custom weaving end-effector and integrated sensing strategy. The behavioural fabrication process is composed by two coordinated fabrication loops, one acting on a local level while the other on a global one, which unfold together in real-time and rely on the already mentioned dense network of sensor data. The woven structure that comes out of this process is not described in a model subsequently “materialised” in the fabrication stage but rather it emerges from a constant negotiation between different fabrication parameters, material properties, site conditions and design intentions expressed through specific performance criteria.
The local loop deals with the direct manipulation of the material with the weaving effector and its coordination, together with the procedure that links the agent-based system with the local robotic movements that defines the weaving logic. The sensor data gathered at this level with an optical 3D scanner are only related to a small portion of the woven mesh ahead of the effector’s weaving direction, where the next weaving sequence will happen.
On the other hand, the global loop deals with the overall woven structure and the performance criteria that inform its shape and how the fabrication system relates to the site conditions. In order to translate these performance criteria, which act as loose guidelines, the system scans the whole structure and generates real-time mapping to drive the actuation and global level of the agent-based system. Design intentions are expressed through the definition of performance criteria parameters, which are constantly evaluated and adjusted in real-time. Furthermore, a major role is played by the definition of the boundary conditions and how the system adapts to the site conditions or create its own.
The research developed through a series of experiments that tested each time different aspects of the system, for instance the local and the global sensing, the adaptive reorientation or the performance-driven responsiveness. The research culminated in a final prototype that represented a moment of synthesis where the whole system was tested to produce a relatively complex woven structure emerging through the negotiations of all the previously tested components. In parallel with the physical prototyping, a digital exploration with the same integrative tool was undertaken in order to create a collection of possible spatial morphologies that showcased how much the interplay of different parameters could influence the final result and open the design process toward new possibilities.
ITECH M.Sc. Thesis Project 2015: Robotic Softness - Behavioural Fabrication Process of a Woven Space
Giulio Brugnaro
Thesis Advisers: Ehsan Baharlou, Lauren Vasey
Thesis Supervisor: Prof. Achim Menges
Second Supervisor: Prof. Jan Knippers