Project Gallery




{kind=link}
Assembly Agency - Adaptive robotic fabrication and assembly of segmented timber plate structures
This Master Thesis proposes a shift from the established architectural delivery as a linear process towards a cyclical adaptive process that challenges the typical separation of design, fabrication and assembly. Using the example of a segmented timber plate structure, the process incorporates the interactive design, the subtractive robotic fabrication, and the robotic assembly into a responsive feedback loop. By constantly updating the digital design model from the physical as-built geometry through vision sensing, the design reacts to environmental variables, perceived tolerances, and machine and fabrication constraints. The resulting cyber-physical system for architectural production allows the user to monitor and adjust the design and, by consequence, the whole production process in real time.
Currently we are experiencing the so-called fourth industrial revolution as a shift towards a new understanding of processes in the industry. The machine is no longer a preprogrammed tool to automate processes, but becoming a receiving and communicating part in the production cycle. By creating a network between software, machine, sensors, and the environment through wireless or wired connection methods, new types of products are evolving, and processes without manual interaction can be achieved. The network utilizes a physical input and output and is therefore called a cyber-physical system.
In architecture the production process is usually linear. The initial design gets engineered, the components are prefabricated and lastly the elements are assembled into a structure or a building. In this linear process, it is a requirement that everything is perfectly designed, engineered and fabricated. The alteration of design or fabrication is almost impossible once the assembly process is running. Complex buildings and structures designed computationally and prefabricated are prone to tolerance issues and can be affected by the environment they are built in. This Master Thesis proposes to not only design and fabricate a structure digitally, but also to include the assembly as a digital process. In doing so, the cyclical system is aware of the assembly during the process of production. The proposed cyber-physical system is then able to adjust design and fabrication according to tolerances and machine constraints. It can also be modified and optimized by the user during the process. This methodology advances computational design in architecture towards a more generative and flexible approach.
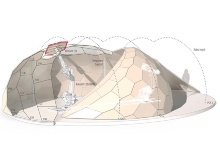
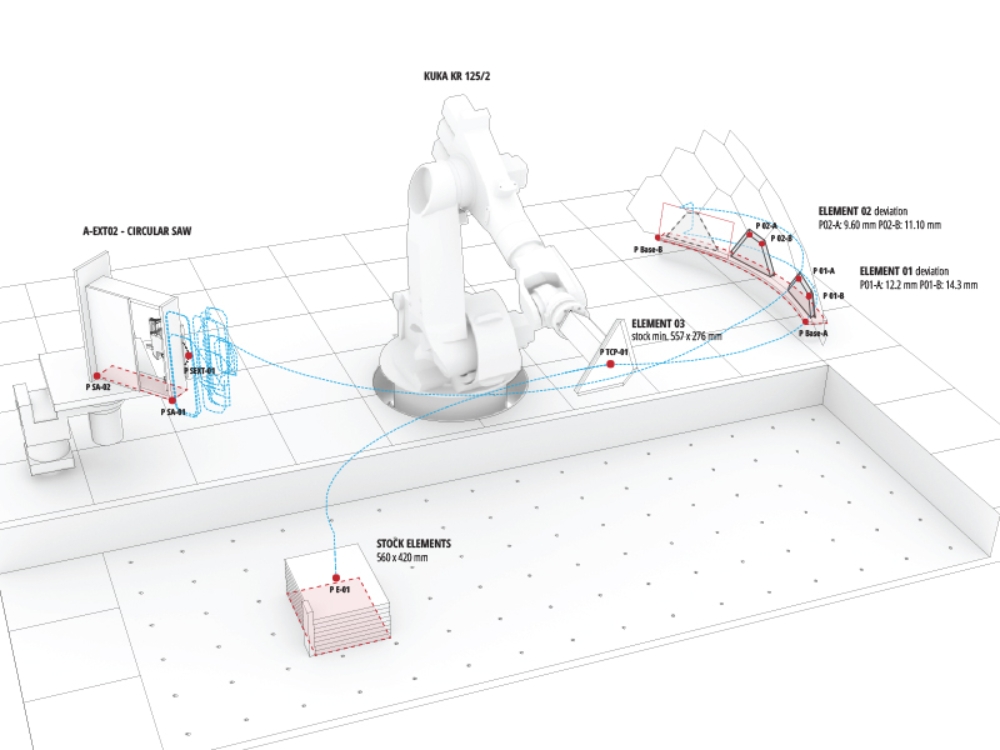
In order to investigate this methodology, a building system was chosen that is known to be functional and has already proven its performance in built construction. Furthermore, it was necessary to build complex structures from a single material with a simple joint for easy robotic assembly. In consideration of these requirements, a hexagonal planar segmented wooden plate system was chosen for the system. In order to allow for the simple assembly process and simultaneously a stable structure that keeps the intended shape without fixation, an abstracted tongue and groove joint was developed as a stacking joint. The three sides facing up are milled as the tongue part and the ones facing down are milled as the groove. Structural stability is achieved by the fact that every hexagonal element connects at least with two, but typically three sides, to the built structure.
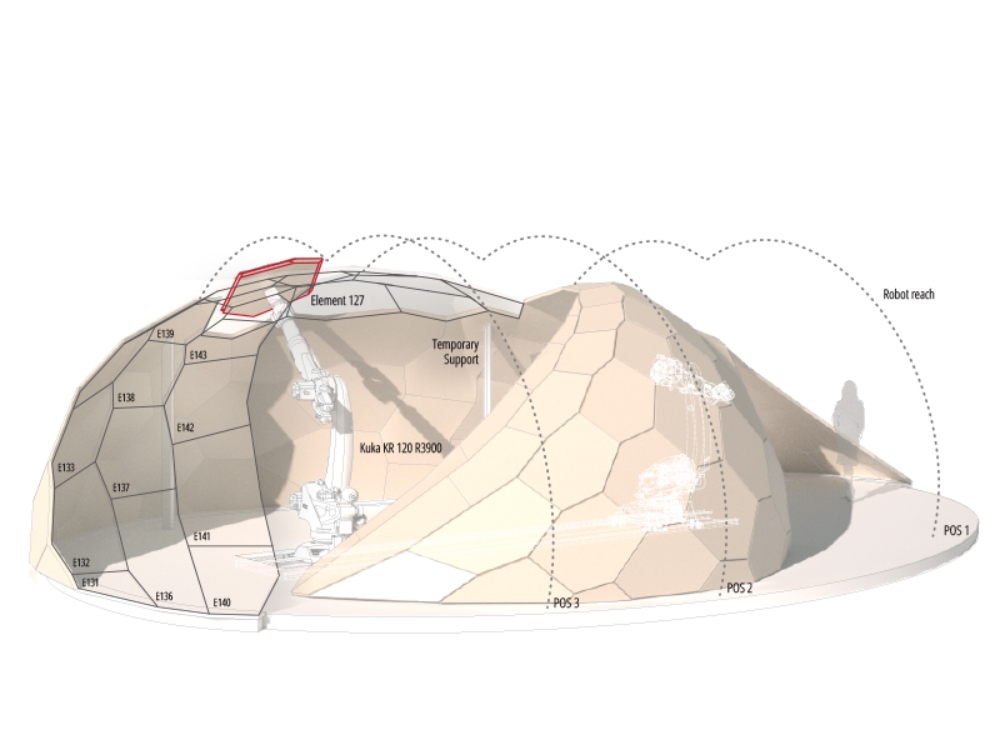
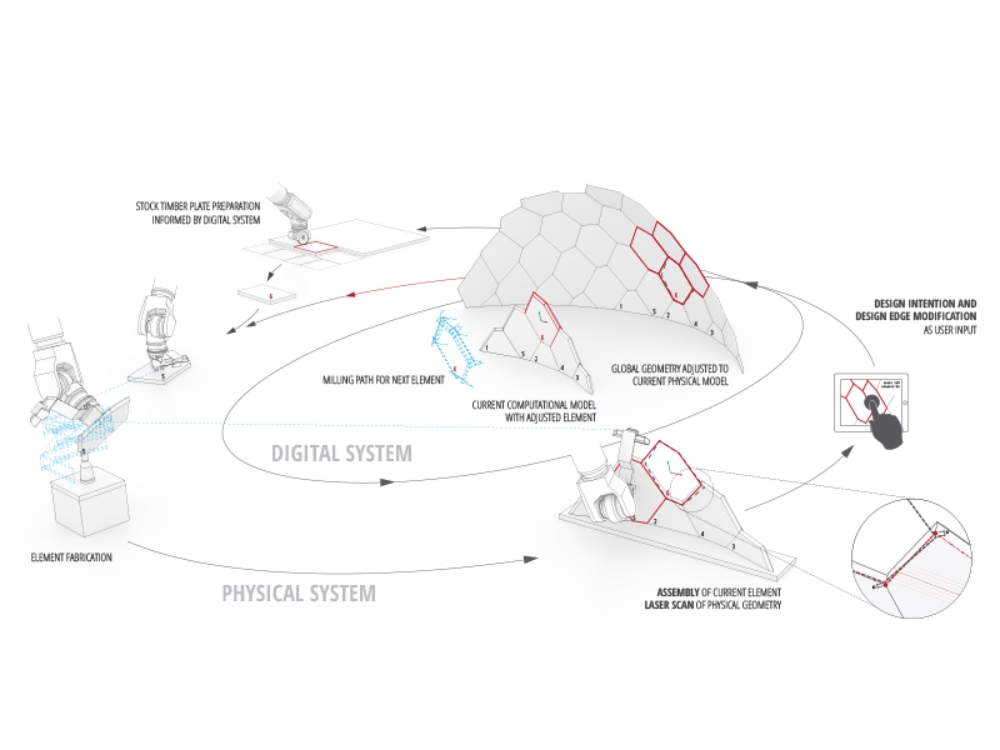
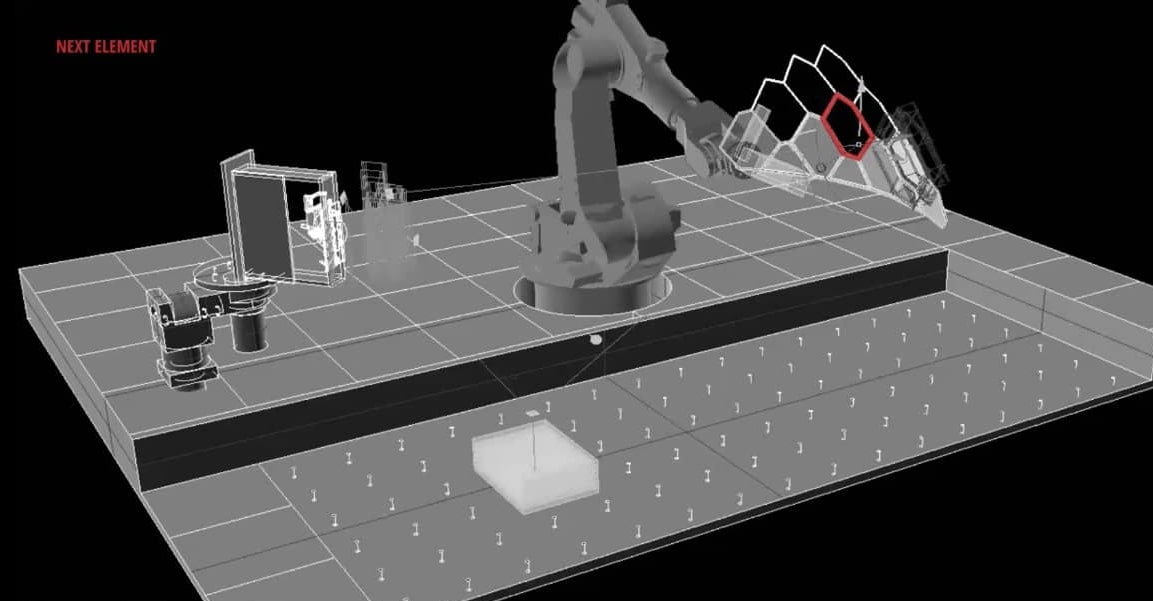
The design engine is the overall structure of the process that describes the iterative procedure. It starts from an initial design intention. The fabrication information for each element is received from the digital model, which contains scanned information from the physical world. On the digital side the design remains flexible and can be adjusted. After the new element is computed, the fabrication and assembly happens in the physical environment.
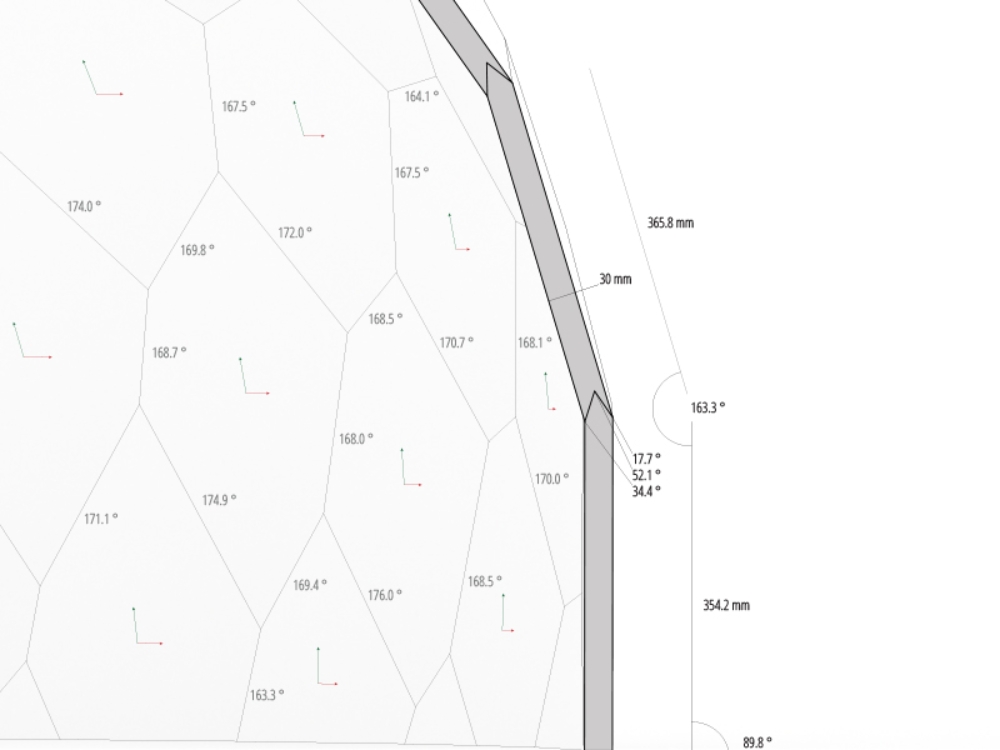
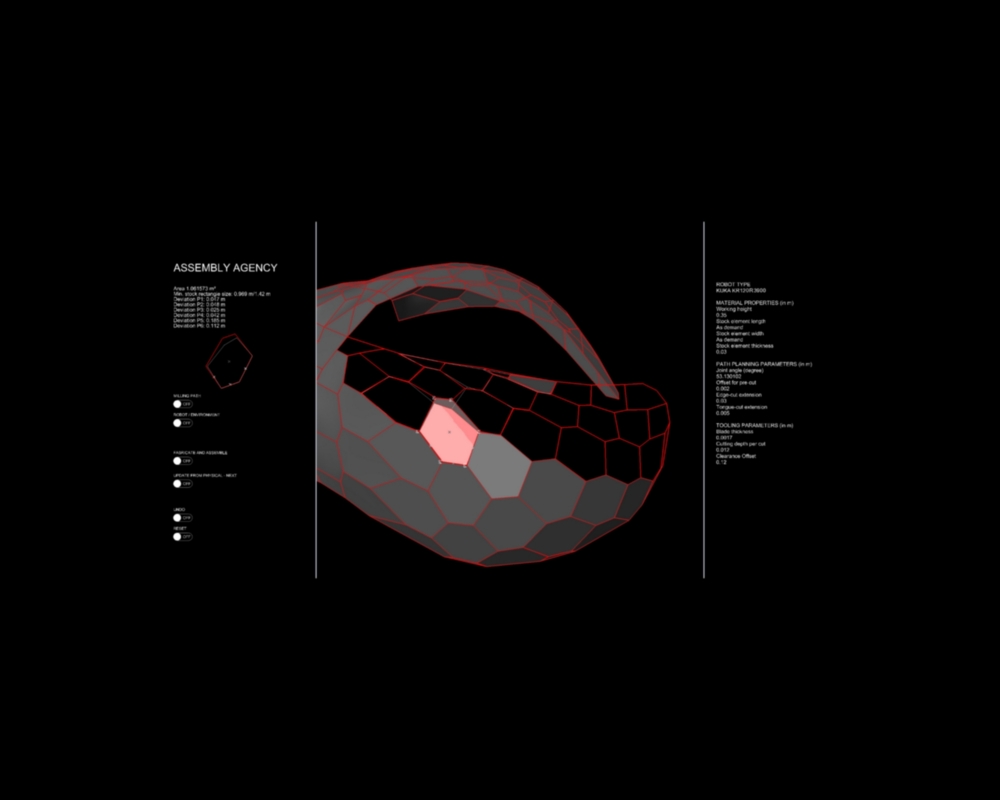
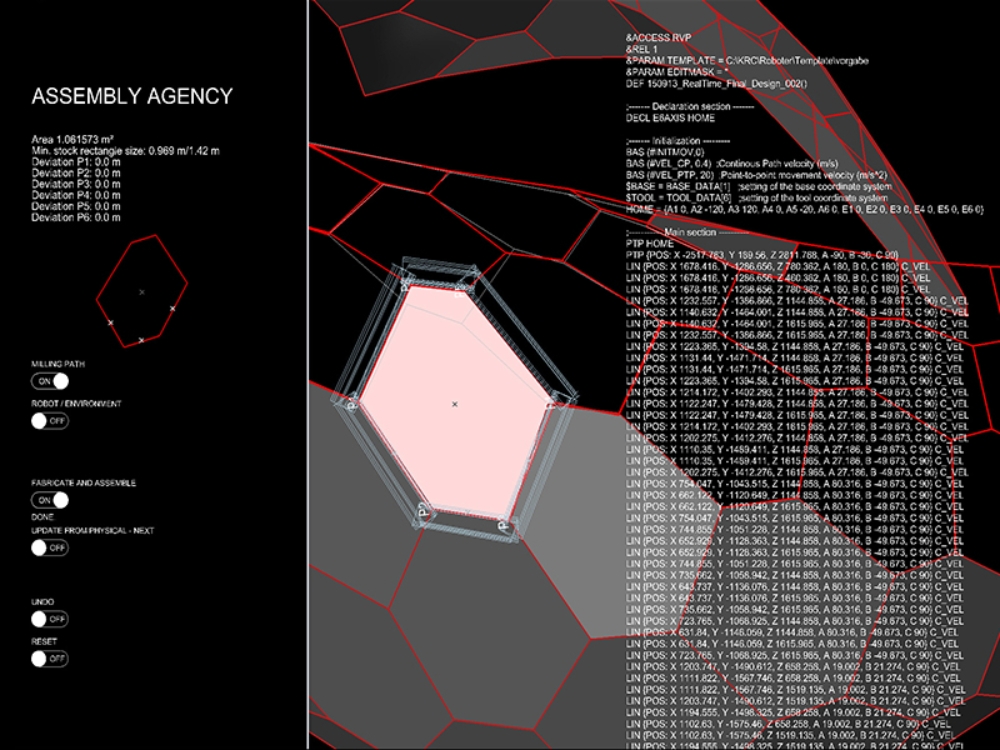
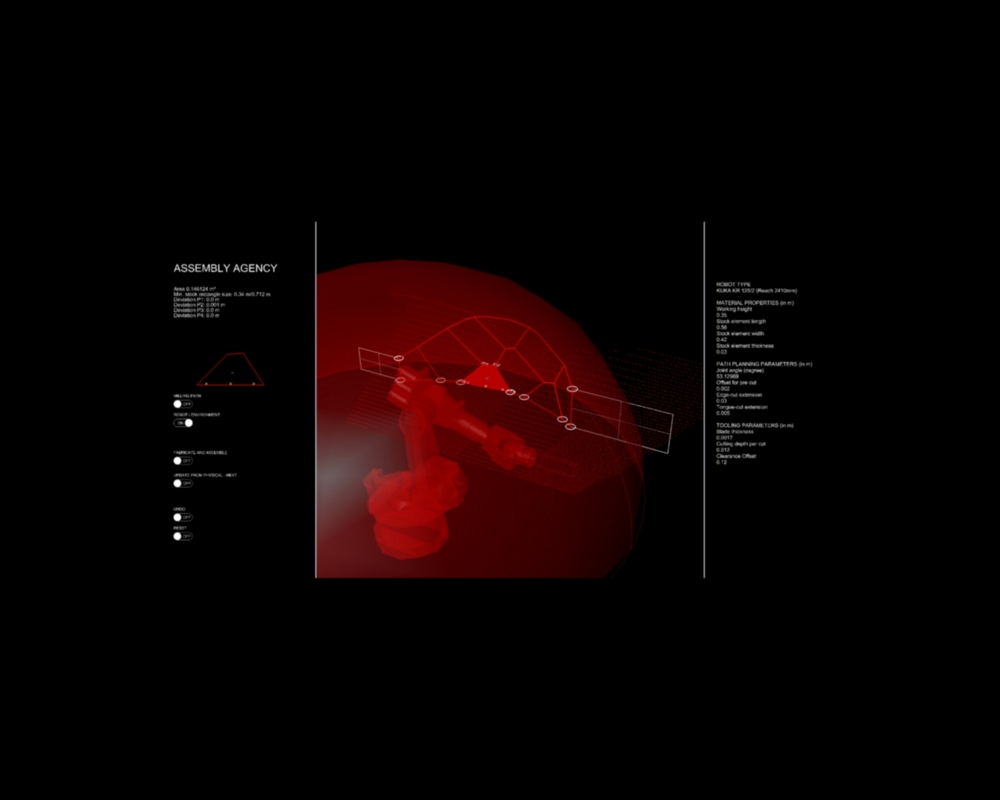
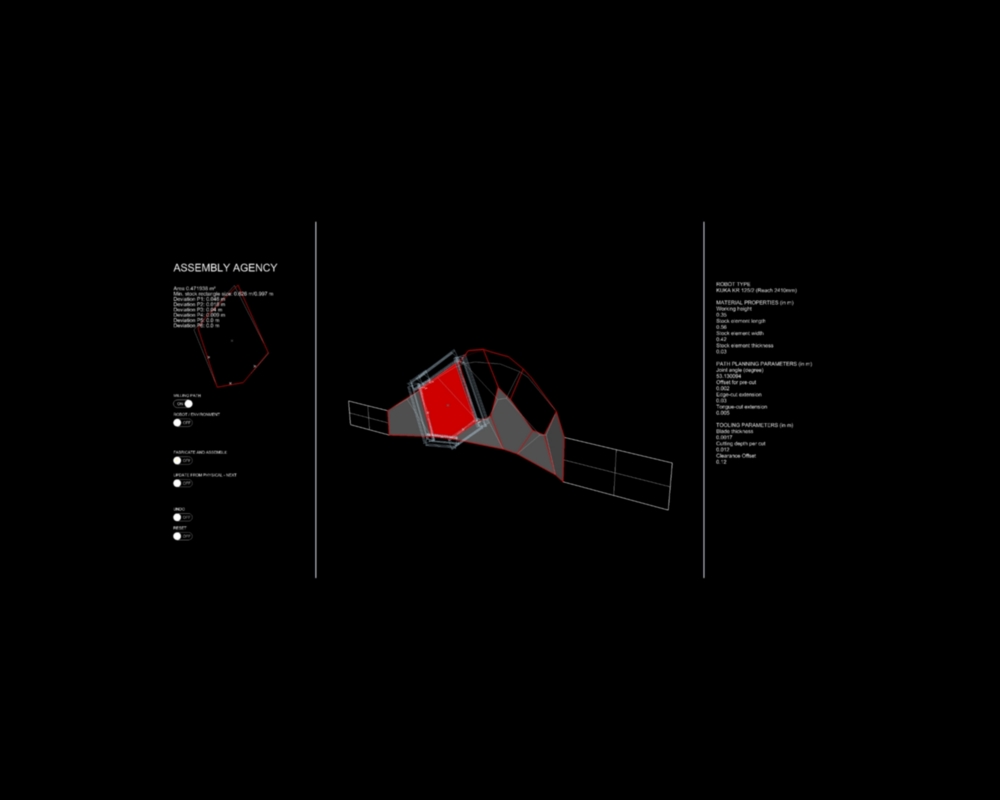
The digital system is the core of the process. Here all information is collected in a database that contains updated point information about the geometry at all time. This database can be updated either automatically by the vision scan or by the manual adjustment. These updates act as the physical input and yield an output that formulates the cyber physical system.Finally, to visualize the whole process and the parameters, as well as the evolving structure, a visual user interface is created. The user is able to monitor and control the whole cyber-physical process and interact with the system through that interface. Parameters are displayed and toggles for physical input and physical output are available. The current deviation, the area of the element and the needed stock element size are calculated in real time.
ITECH M.Sc. Thesis Project 2014: Assembly Agency - Adaptive robotic fabrication and assembly of segmented timber plate structures
Julian Höll
Thesis Advisers: T. Schwinn, L. Vasey, E. Baharlou
Thesis Supervisor: Prof. Achim Menges
Second Supervisor: Prof. Jan Knippers
This Master Thesis proposes a shift from the established architectural delivery as a linear process towards a cyclical adaptive process that challenges the typical separation of design, fabrication and assembly. Using the example of a segmented timber plate structure, the process incorporates the interactive design, the subtractive robotic fabrication, and the robotic assembly into a responsive feedback loop. By constantly updating the digital design model from the physical as-built geometry through vision sensing, the design reacts to environmental variables, perceived tolerances, and machine and fabrication constraints. The resulting cyber-physical system for architectural production allows the user to monitor and adjust the design and, by consequence, the whole production process in real time.
Currently we are experiencing the so-called fourth industrial revolution as a shift towards a new understanding of processes in the industry. The machine is no longer a preprogrammed tool to automate processes, but becoming a receiving and communicating part in the production cycle. By creating a network between software, machine, sensors, and the environment through wireless or wired connection methods, new types of products are evolving, and processes without manual interaction can be achieved. The network utilizes a physical input and output and is therefore called a cyber-physical system.
In architecture the production process is usually linear. The initial design gets engineered, the components are prefabricated and lastly the elements are assembled into a structure or a building. In this linear process, it is a requirement that everything is perfectly designed, engineered and fabricated. The alteration of design or fabrication is almost impossible once the assembly process is running. Complex buildings and structures designed computationally and prefabricated are prone to tolerance issues and can be affected by the environment they are built in. This Master Thesis proposes to not only design and fabricate a structure digitally, but also to include the assembly as a digital process. In doing so, the cyclical system is aware of the assembly during the process of production. The proposed cyber-physical system is then able to adjust design and fabrication according to tolerances and machine constraints. It can also be modified and optimized by the user during the process. This methodology advances computational design in architecture towards a more generative and flexible approach.
In order to investigate this methodology, a building system was chosen that is known to be functional and has already proven its performance in built construction. Furthermore, it was necessary to build complex structures from a single material with a simple joint for easy robotic assembly. In consideration of these requirements, a hexagonal planar segmented wooden plate system was chosen for the system. In order to allow for the simple assembly process and simultaneously a stable structure that keeps the intended shape without fixation, an abstracted tongue and groove joint was developed as a stacking joint. The three sides facing up are milled as the tongue part and the ones facing down are milled as the groove. Structural stability is achieved by the fact that every hexagonal element connects at least with two, but typically three sides, to the built structure.
The design engine is the overall structure of the process that describes the iterative procedure. It starts from an initial design intention. The fabrication information for each element is received from the digital model, which contains scanned information from the physical world. On the digital side the design remains flexible and can be adjusted. After the new element is computed, the fabrication and assembly happens in the physical environment.
The digital system is the core of the process. Here all information is collected in a database that contains updated point information about the geometry at all time. This database can be updated either automatically by the vision scan or by the manual adjustment. These updates act as the physical input and yield an output that formulates the cyber physical system.Finally, to visualize the whole process and the parameters, as well as the evolving structure, a visual user interface is created. The user is able to monitor and control the whole cyber-physical process and interact with the system through that interface. Parameters are displayed and toggles for physical input and physical output are available. The current deviation, the area of the element and the needed stock element size are calculated in real time.
ITECH M.Sc. Thesis Project 2014: Assembly Agency - Adaptive robotic fabrication and assembly of segmented timber plate structures
Julian Höll
Thesis Advisers: T. Schwinn, L. Vasey, E. Baharlou
Thesis Supervisor: Prof. Achim Menges
Second Supervisor: Prof. Jan Knippers