Performative morphology denotes the capacity of a natural or artificial material system to adjust specifically to system-external and system-internal conditions through morphological differentiation.
This level of differentiation is emblematic for natural systems, where a high degree of morphological variation, and consequently of functionality, is achieved with relatively minimal material input. Digital fabrication - in contrast to craft or industrial fabrication - allows for the introduction of a high level of morphological differentiation into architectural design. The realization of a biomimetic design approach thus not only becomes practically feasible, but also serves as a filter through which the range of computationally possible morphological variations can be informed to achieve more specific functionality and performance.
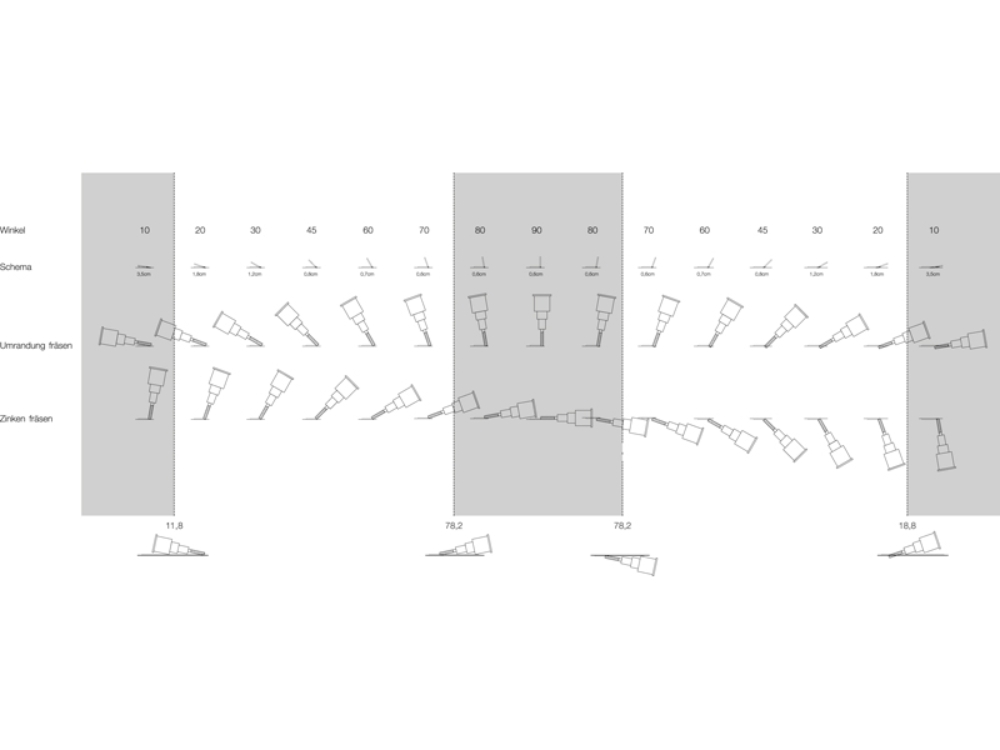
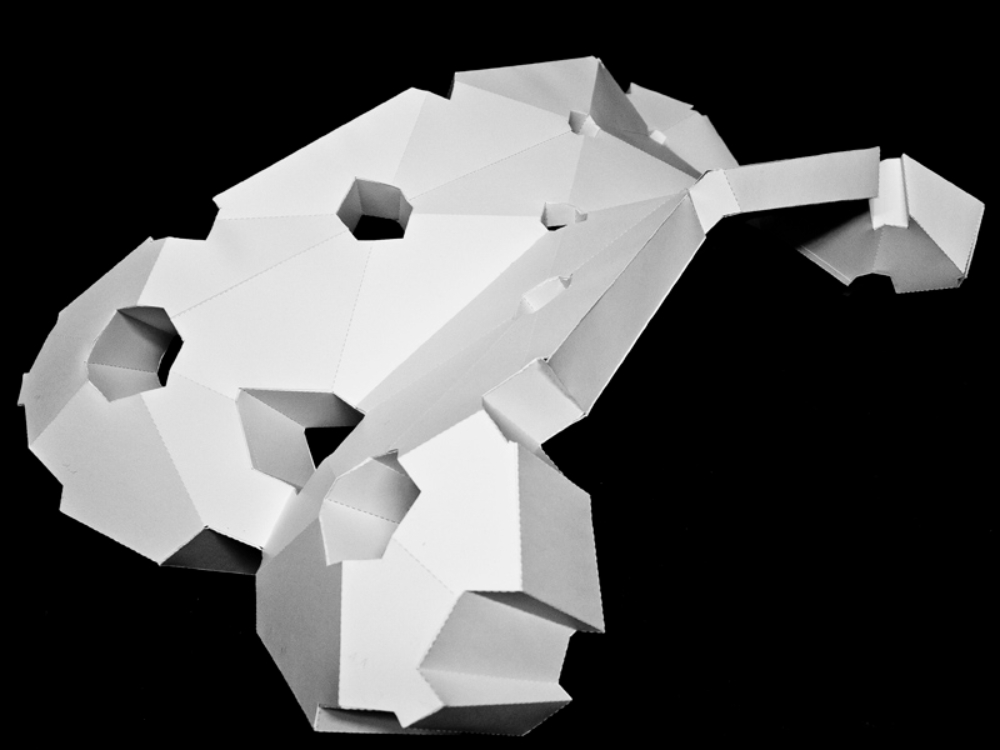
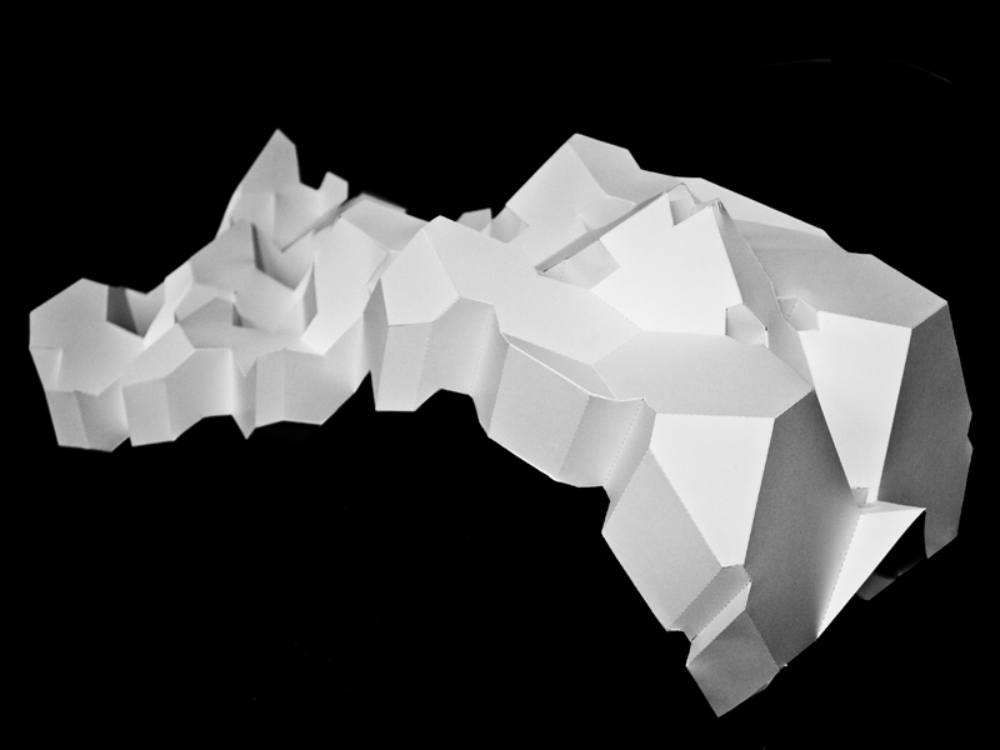
In its first part, the research project investigates the implications of using a 6-axis industrial robot. The machine shows higher degrees of freedom in its range of motion than common process-specific CNC machines and allows for the development of a complex finger-joined plate structure. Here, computational form generation and robotic manufacturing are directly interrelated. Thus both varying finger joint angles and mitres, as well as the connection of three or more plates in one seam are possible and only limited by the robot kinetics’ range of motion.
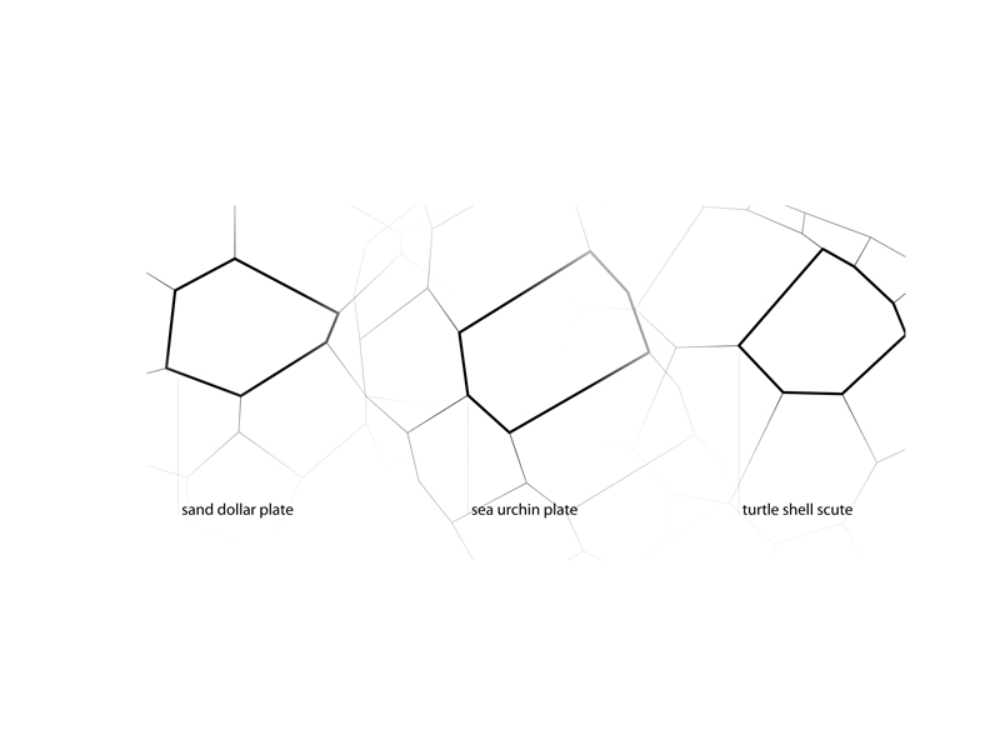
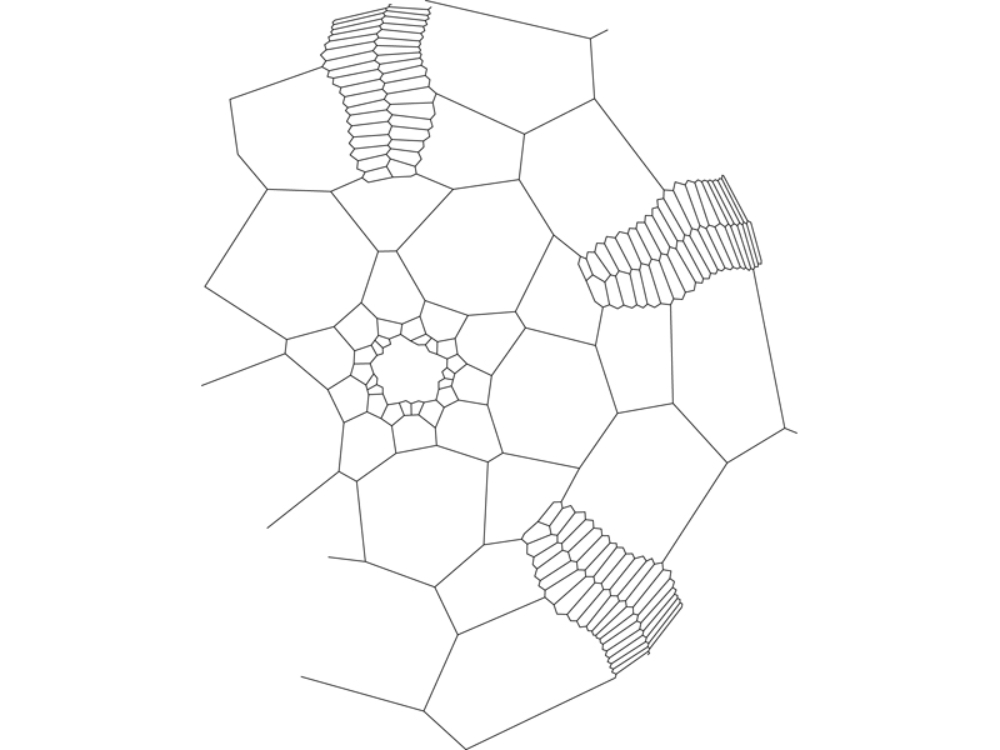
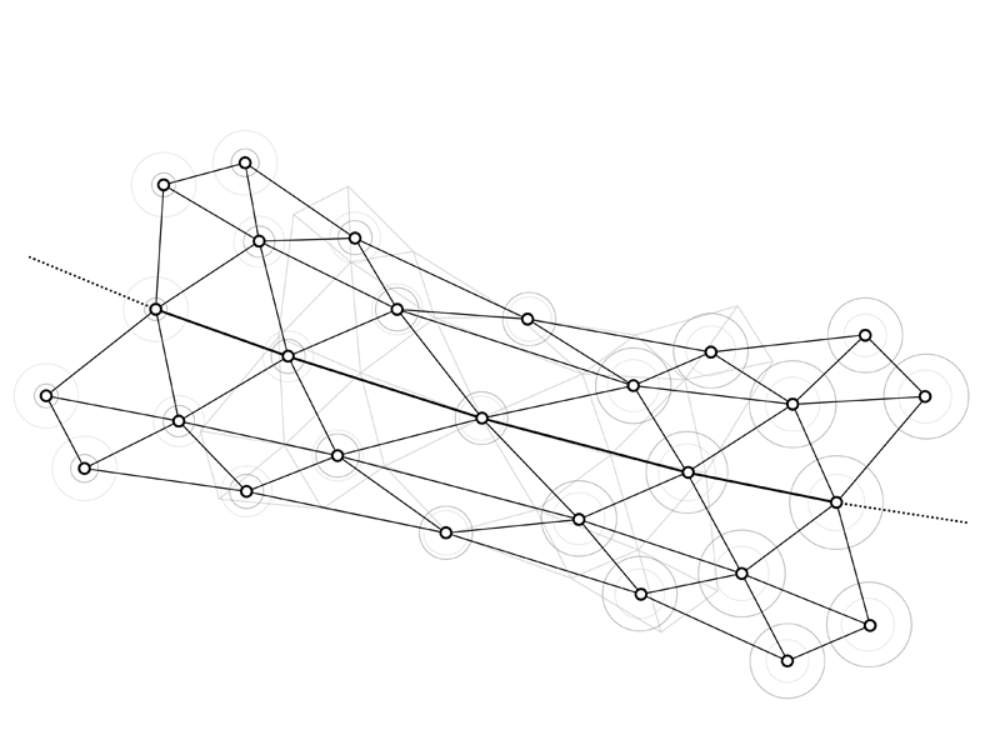
In its second part, the project is focused on the need for an integration of the potential applications of this system into a generative computational design procedure. This raises the question as to how the possible geometric differentiations can be used in an application specific manner. Biology offers a multitude of examples how local and global morphological differentiation in plate structures allow for performance-based adaptations. The wide range of computationally feasible variations of the plate-structure is thus informed and specified not only through the constraints of the industrial robot, but also through embedding biological principles into the computational model.
Performative Morphology Brief