

VIRTUAL ROBOT
Robotic Simulation for Grasshopper
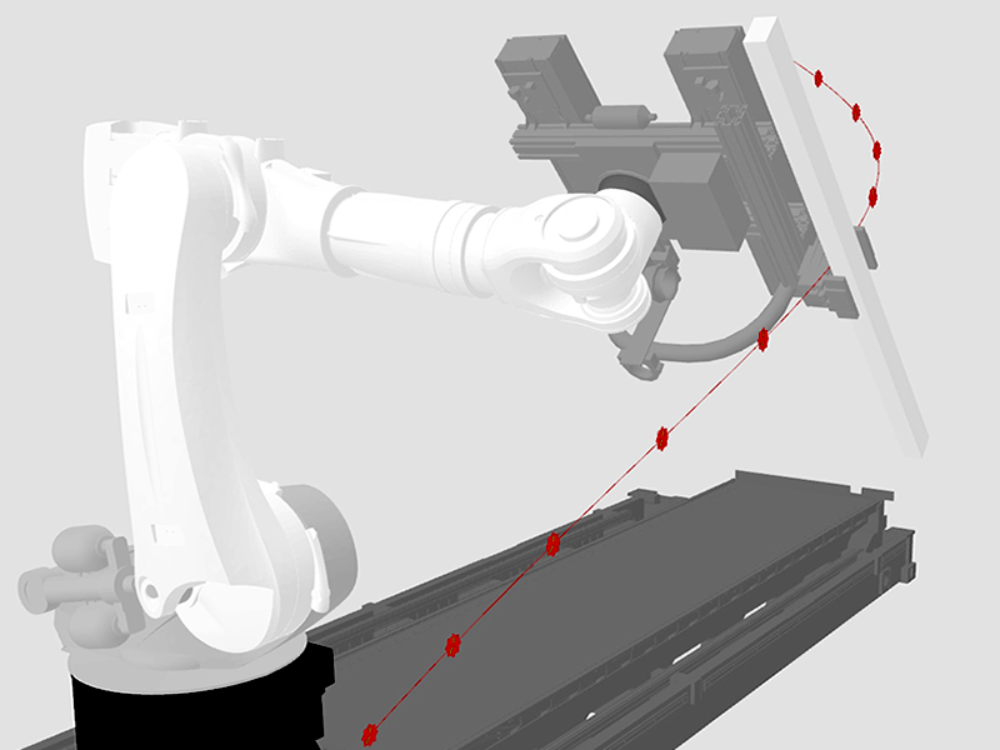
‘VirtualRobot’ is a lightweight plugin that integrates robotic fabrication simulation within the computational design environment of Grasshopper. It consists of a core C# class library for robotic system definition and a component library for building custom robotic fabrication workflows.
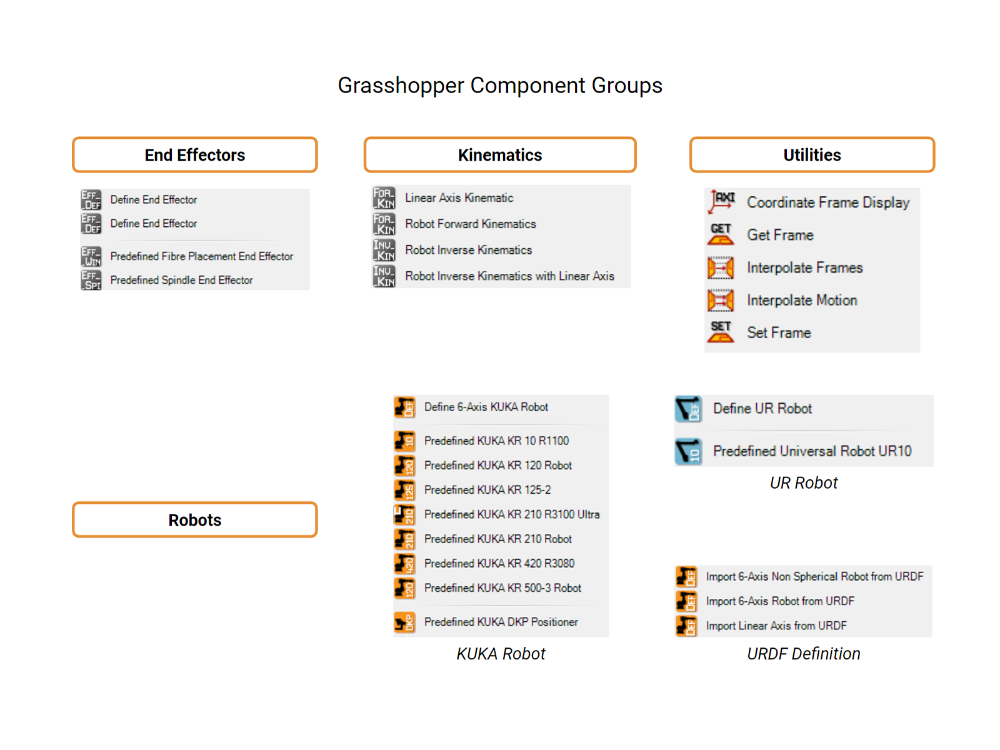
The objects in the core library encapsulate kinematic models and visualisation settings of various industrial robots as well as other peripherals (e.g., end effector, linear axis, rotational positioner etc.). The component library includes tools for defining and simulating robotic movements (e.g., Forward / Inverse Kinematics solvers for spherical and non-spherical axis robots, user definitions of robotic systems, display components for coordinate frames etc.).
CONTRIBUTORS
ICD: Long Nguyen, Tobias Schwinn, Tim Stark, Xiliu Yang
HOW TO CITE
Please include the following text in the acknowledgement: “The authors would like to thank Long Nguyen for the development of the robot kinematics solver ‘VirtualRobot’ at the Institute for Computational Design and Construction (ICD).”
Contact Information

Tim Stark
M.Sc.Research Associate