
Photographs by ICD/ITKE/ITFT University of Stuttgart











Process images and diagrams by ICD/ITKE/ITFT University of Stuttgart











{kind=link}
ITECH RESEARCH DEMONSTRATOR 2018-19
The ITECH research demonstrator 2018/19 investigates large-scale compliant architecture inspired by the folding mechanisms of the Coleoptera coccinellidae (Ladybug) wings. The demonstrator is composed of two adaptive folding elements made of carbon and glass fibre-reinforced plastic. The demonstrator is first of its kind to employ industrial tape-laying technology for an automated fabrication of large-scale compliant mechanisms. Their kinetic behaviour is achieved through distinct compliant hinge zones with integrated pneumatic actuators. An interactive control system, consisting of integrated sensors, online communication, and backend computational processing, facilitates interactive and user-controlled adaptation. The project is part of a successful series of research demonstrators showcasing the potential of computational design, simulation and fabrication processes in bio-inspired architecture. The project was designed and realized by students and researchers, supported by a multi-disciplinary team of architects, engineers, biologists, and palaeontologists.
ADAPTIVE ARCHITECTURE
The pursuit of adaptive structures has captivated architects and engineers throughout history – many concepts and technical solutions have been proposed that might enable building systems to respond to varying spatial and structural demands, as well as to react to changing environmental influences. While most recent examples of adaptive and reconfigurable architectural elements rely on rigid body mechanics, this demonstrator explores the potentials of utilizing fibre-reinforced plastic materials in large-scale kinetic folding systems, utilizing the elastic deformation of distinct flexible hinge zones to enable spatial reconfiguration. Furthermore, it attempts to utilize computational methods and robotic systems not only for design and fabrication, but also as the architecture itself. The overall kinetic system, which can modify its degree of enclosure, is an intelligent robotic architectural system – able to react to and communicate with its users through spatial configuration.
BIOMIMETIC INVESTIGATION
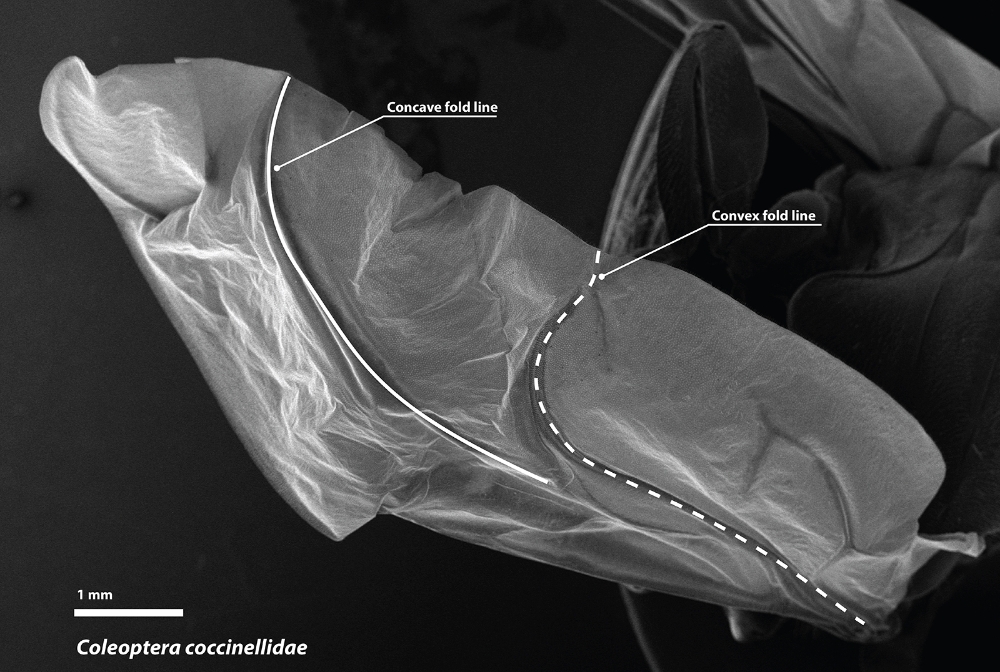
An initial biomimetic investigation preceded design development to identify functional kinematic principles which could be abstracted and transferred to technical architectural applications. In collaboration with Institute of Evolution and Ecology and the department for Paleobiology of the University of Tübingen, the kinematic behaviour of origami like folding patterns of Coleoptera coccinellidae wings were identified as promising biological role-models.
Many beetle species cover their thin and fragile hind wings with more robust forewings. In order to compactly pack them under the forewings, the wings fold along distinct flexible hinge zones with specifically defined mechanical properties. Folded, elastic energy is stored in the hinges to enable a rapid unfolding in case the insect must escape danger. Those patterns can be mathematically described as flexagons, a common origami folding pattern. Through analysis and mathematical geometric descriptions, it was possible to investigate and abstract the kinematic behaviour, enabling distinct elastic hinge zones to be materialized with specifically programmed material gradients within the fibre-reinforced plastic.
INTEGRATIVE DIGITAL DESIGN MODEL
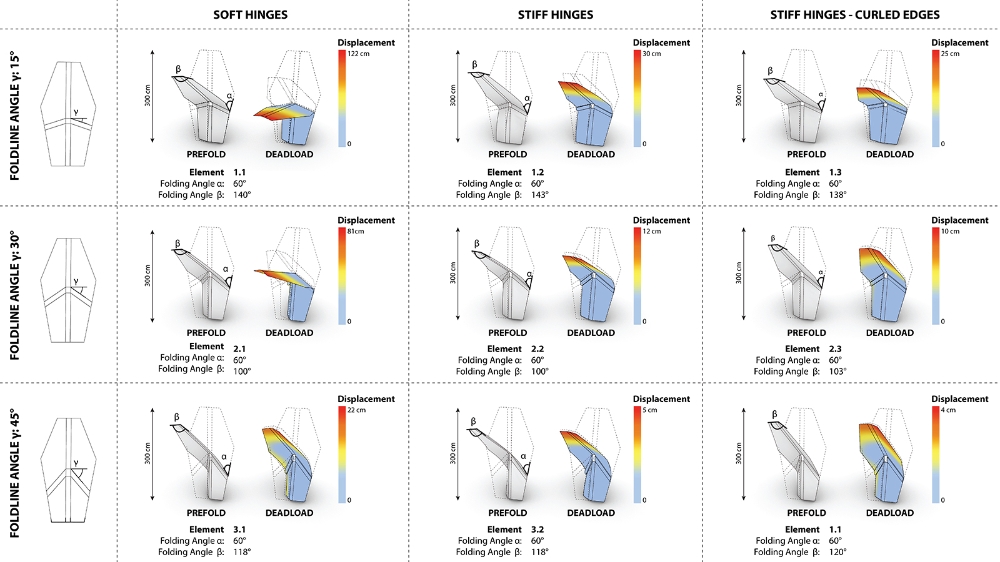
An integrative digital workflow was developed to integrate multiple considerations, including component design, kinematic behaviour, plate discretization, simulation and structural analysis, as well as generation of fabrication data.
After the folding pattern and component contours were designed purely in two dimensions, the geometry was transferred into three-dimensional position, enabling adjustment in the orientation and inclination. A kinematic skeleton was developed based on the initial two-dimensional folding pattern, used to evaluate folding behaviour. Various constraints and support conditions were implemented to analyse their influence on the kinematics and resultant spatial adaptation. After discretizing the components according to fabrication constraints and structural considerations, specific material properties were locally assigned, and the model was sent to a finite element analysis (FEA) software for simulation of the kinematic and load-bearing behaviour. In the last step, stiffness gradients and discretization patterns were used to calculate the necessary directionalities of the laminate layers. A custom computational tool enabled robot and machine control files to be output for a completely automated industrial tape laying process.
FABRICATION, MATERIAL GRADIENT AND STIFFENING
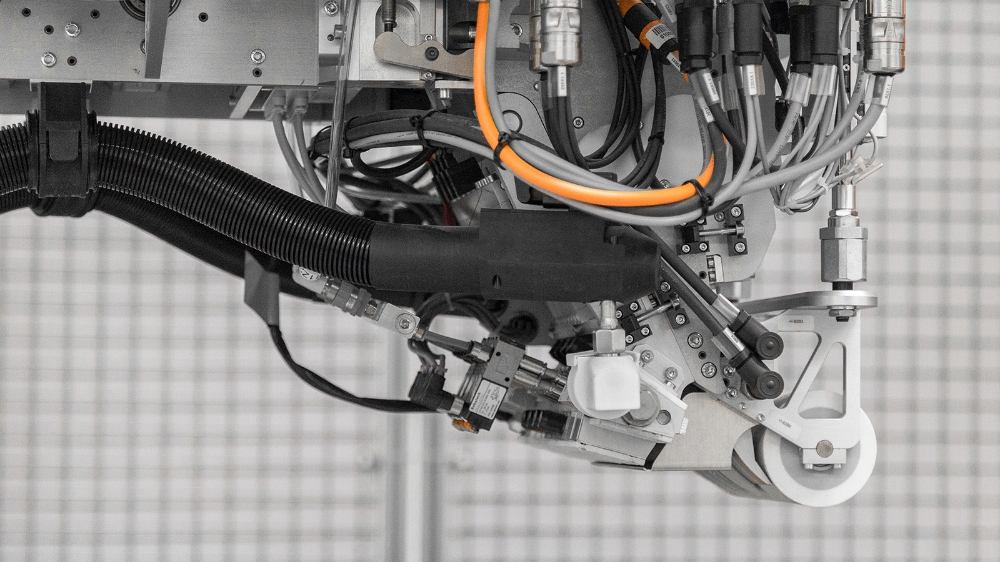
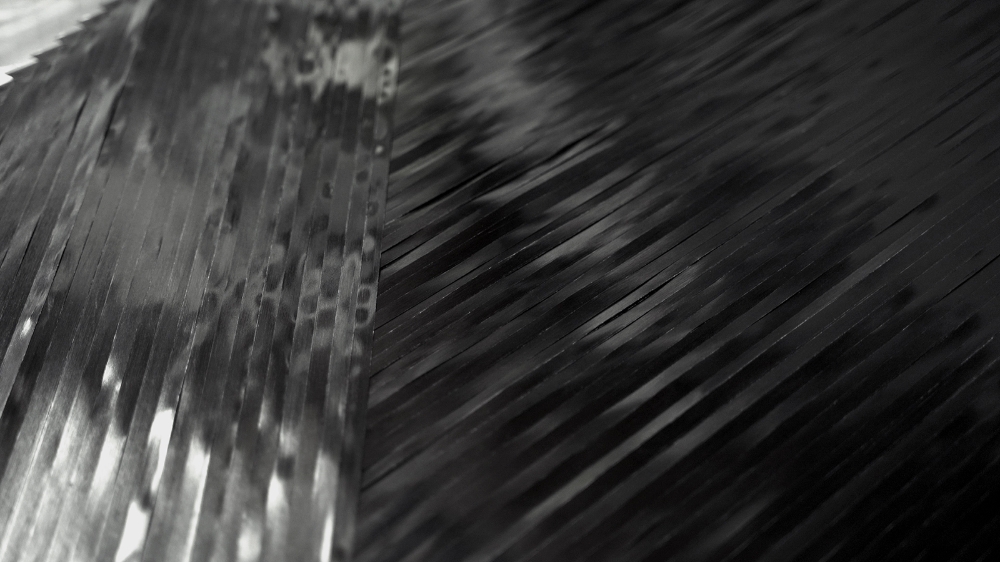
An industrial robotic tape-laying process of carbon and glass fibres within a polyamide matrix enabled automated fabrication of laminates with highly differentiated material gradients. Thus, it was possible to precisely adjust the material properties by adapting fibre orientation and laminate set-up according to structural and functional demands. Carbon fibre was only used where structurally needed, while glass fibre was used to create continuous large-scale plates. Furthermore, the translucency of the glass fibre enhanced the architectural qualities and differentiated translucency of the components.
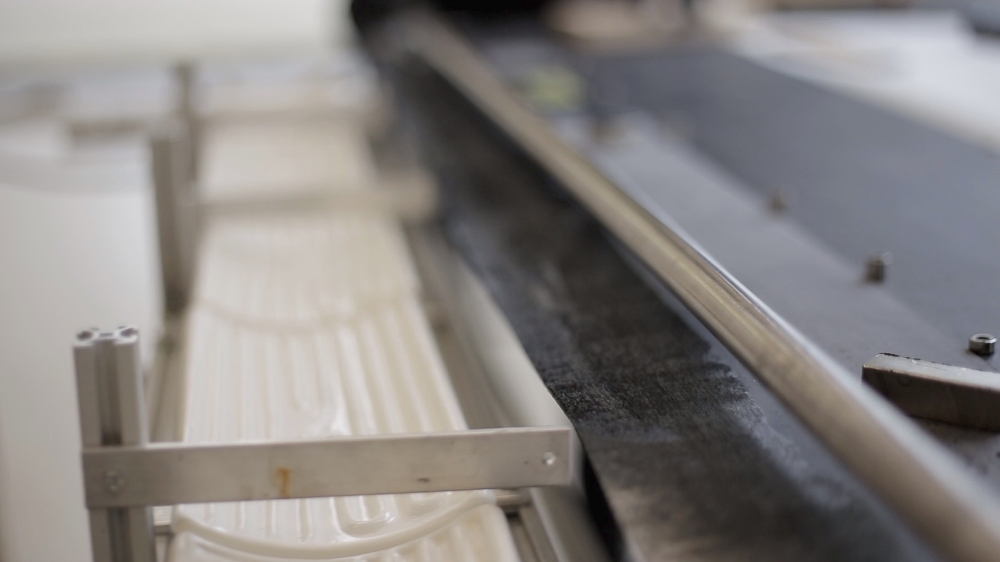
After the fibre tapes were laid in a flat configuration, the laminate set-up was pressed under heat to melt the thermoplastic matrix and afterwards cooled under pressure. In order to reinforce critical edge zones, heat forming with a custom developed machine was utilized to curl the edges into beam-like elements. Thus, it was possible to increase the cross-section and therefore the moment of inertia in selected locations without adding significantly more material and weight to the system.
INTEGRATED ACTUATION
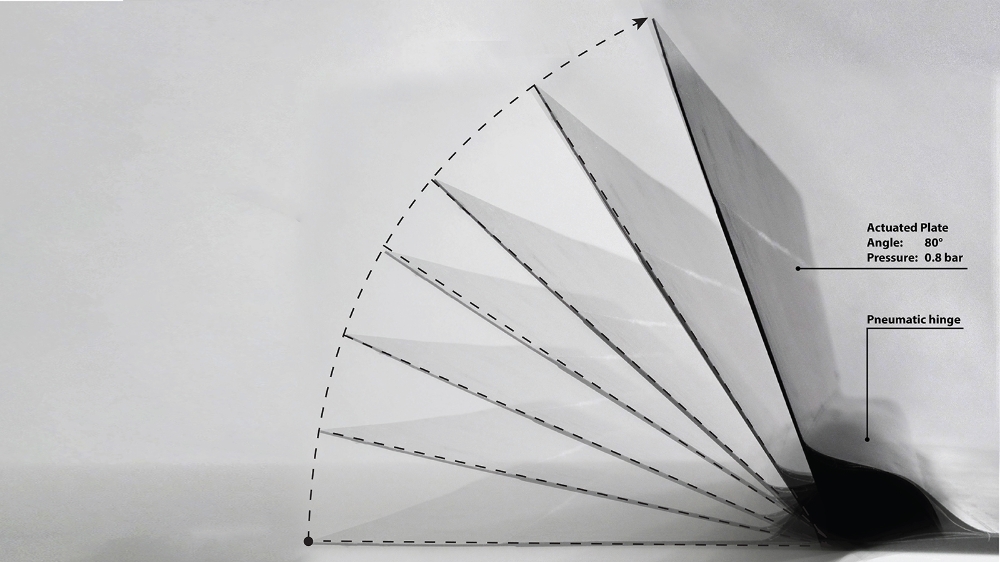
The motion of the demonstrator can be achieved through active pneumatic actuation of the cushions, one in each hinge zone, allowing for differentiation of the kinematic behaviour. Furthermore, pressurizing each hinge enhances the structural capacity under external load conditions. Due to the integration of the actuation system within the composite laminate, the structure overcomes the need for mechanical connections between the folding elements and actuation mechanism. The eccentric positioning of the cushions within the laminate also facilitates a controlled folding direction.
Relatively wide and long hinge zones with comparatively low-pressure values (0.8 bar in the horizontal and 0.4 bar in the vertical hinges) can achieve substantial angle changes from 0° to nearly 80°. During folding, elastic energy is stored within the compliant hinge zones, enabling the elements to spring back to resting position after pressure release.
RECONFIGURATION, CONTROL AND INTERACTION
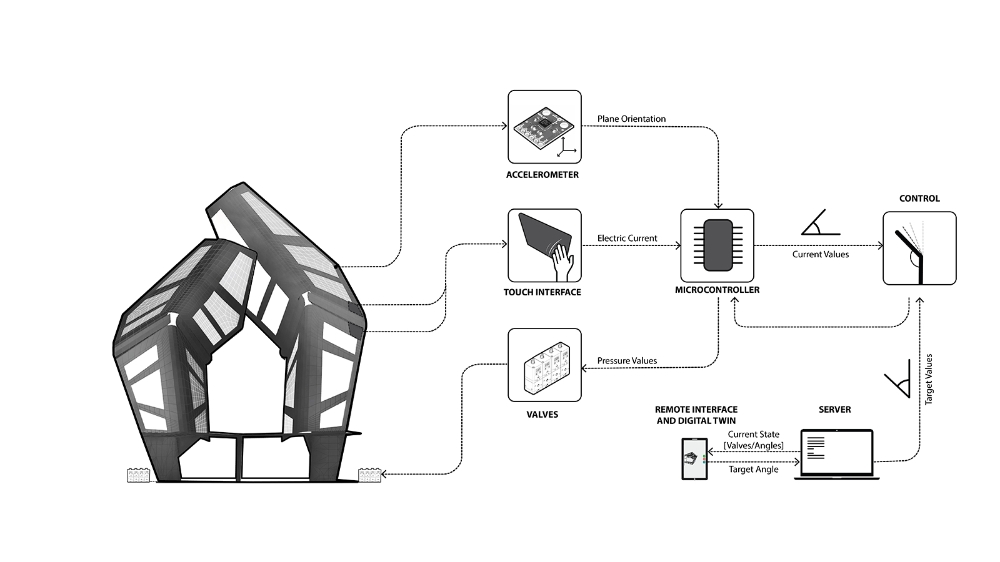
To regulate the pressure in each actuator individually, proportional pressure control technology is used. Communication is managed by a central server, which communicates to analogue signal generators in order to regulate the proportional pressure valves, triggering the folding motion of the elements. Proportional pressure control technology is used to regulate the pressure in each actuator individually. Accelerometers integrated within the composite plates are used to determine the current folding state of the demonstrator and to inform a digital twin of the system state. To compensate for the shortcomings in off-the-shelf components and to minimize complexity, circuit boards and custom programmable sensor modules were designed and fabricated.
Several interaction principals enabled a user to directly interact with the pavilion. The first interaction scenario uses physical interaction through the conductivity of carbon fibres, enabling parts of the pavilion to be touch sensitive. When a user taps the structure in locally defined areas, distinct motion behaviours including opening and closing can be triggered.
A second mode of interaction is enabled through a custom mobile and web-based user control interface, allowing a user to activate and control the motion of the demonstrator via smart phone or tablet PC. The interface simultaneously visualizes a real-time 3D model digital twin representing the current folded state.
INTEGRATED DEMONSTRATOR
The ITECH Research Demonstrator 2018-19 consists of two folding components with a width of 1.70 m and height of 3.00 m and 2.50 m and a total weight of 23 kg per element. The laminates for the two elements were manufactured by robotic tape-laying of up to eight carbon- and glass fibre tapes simultaneously with a total length of approximately 30 km and 12 mm width, impregnated with polyamide matrix. The components were discretized into several individual elements, each produced according to fabrications constraints and specific mechanical demands. With a maximum actuation pressure of 0.8 bar in the horizontal hinges and 0.4 bar in the vertical hinges, a folding angle of nearly 80° can be achieved.
The demonstrator serves as a proof-of-concept, representing the possibilities of achieving an adaptive architectural scale structure composed of fibre-reinforced plastic laminates with compliant hinge zones and integrated pneumatic actuators. Furthermore, it investigates the possibilities of direct interaction between the built environment and its inhabitants through active control and real-time communication. Such a system is only possible due to an integration of computational design, simulation and fabrication process and highlights the innovation potential of an interdisciplinary research and teaching environment.
PROJECT TEAM
ICD Institute for Computational Design and Construction - Prof. A. Menges
ITKE Institute of Building Structures and Structural Design - Prof. Dr.-Ing.Jan Knippers
ITFT Institute for Textile and Fiber Technologies - Prof. Dr.-Ing. Götz T. Gresser
Scientific Development
Axel Körner, Larissa Born, Oliver Bucklin, Seiichi Suzuki, Lauren Vasey
Concept Development, System Development, Fabrication & Construction
Miro Bannwart, Eliza Biala, Xiaoyu Chen, Rebeca Duque Estrada de Almeida Araujo, Farnaz Fattahi, Rob Faulkner, David Horvath, Niloofar Imani, You-Wen Ji, Fabian Kannenberg, Nate Kaylor, Denitsa Koleva, Jure Kozmos, I-Ching Lee, Ada Lezuchowska, Zhiqi Lin, Samantha Melnyk, Seyed Mobin Moussavi, Mona Mühlich, Seyed Ahmad Razavi, Tamara Rosales, Emi Shiraishi, Sanoop Siby, Piyanat Songkhroh, Hana Svatoš-Ražnjevic, Naomi Kris Tashiro, Babasola Thomas, Aditya Tiwari, Maria Wyller, Nima Zahiri, Ruqing Zhong
With support of
Anja Mader, Katja Rinderspacher, Maria Yablonina
In collaboration with
Compositence GmbH
Department of Evolutionary Biology of Invertebrates – Prof. Oliver Betz
Department of Palaeontology of Invertebrates – Prof. James Nebelsick
University of Tuebingen
Supported by
Autodesk
Roy Hohlfeld