Bilder von ICD Universität Stuttgart
















Prozess Bilder von ICD Universität Stuttgart





{kind=link}
ICD Aggregat Pavillon 2015
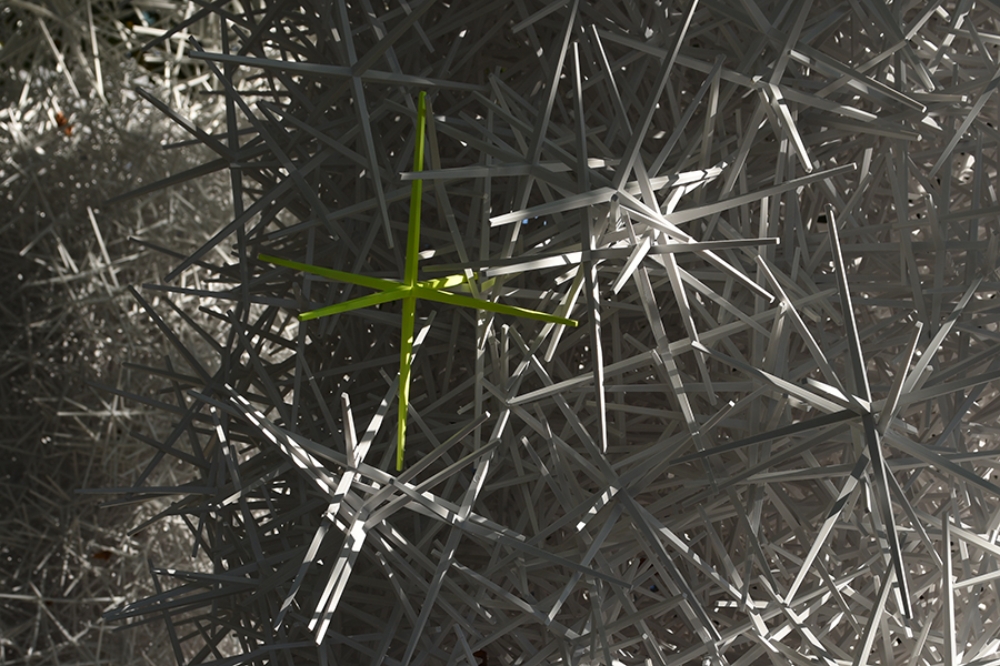
Der ICD Aggregat Pavillon 2015 ist die erste architektonische Struktur, die im öffentlichen Raum mit einem entworfenen granularen System realisiert worden ist. Der Pavillon wurde im Sommer 2015 an einem zentralen Ort an der Universität Stuttgart, Deutschland, errichtet und ausgestellt. Entworfene Granulate werden als Partikelsysteme mit hoher Teilchenzahl definiert, in denen die einzelnen Partikel synthetisch hergestellt und geometrisch definiert sind. Durch die Definition der Geometrie des einzelnen Partikels wird das Granulat zu programmierbarer Materie, die Eigenschaften aufweist, die in natürlich vorkommenden Granulaten wie Sand oder Kies nicht vorkommen. Synthetische granulare Systeme sind ein neuer Bereich der architektonischen Entwurfsforschung.
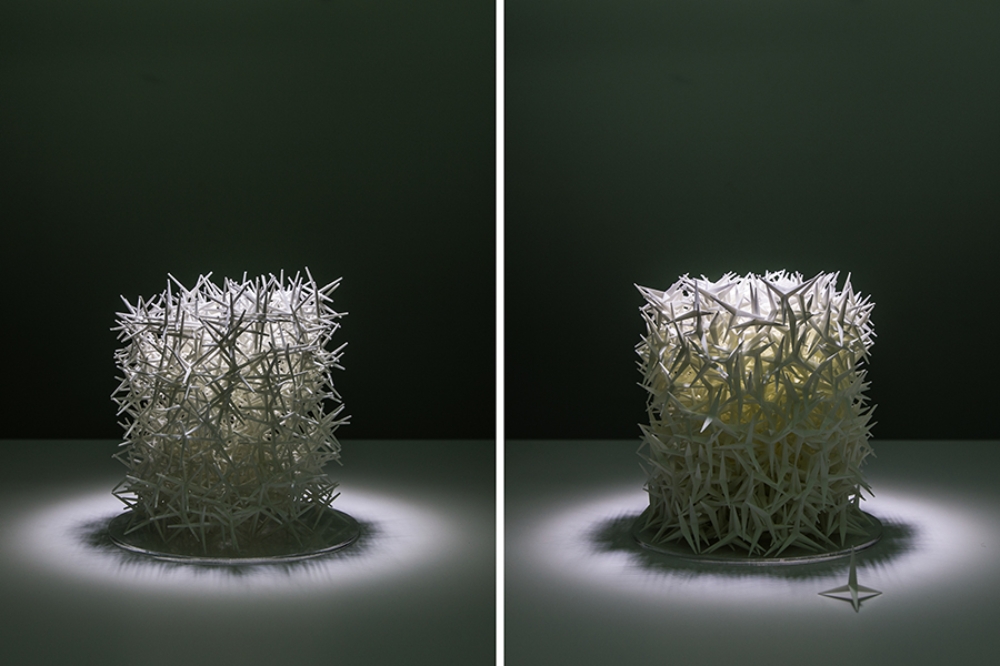
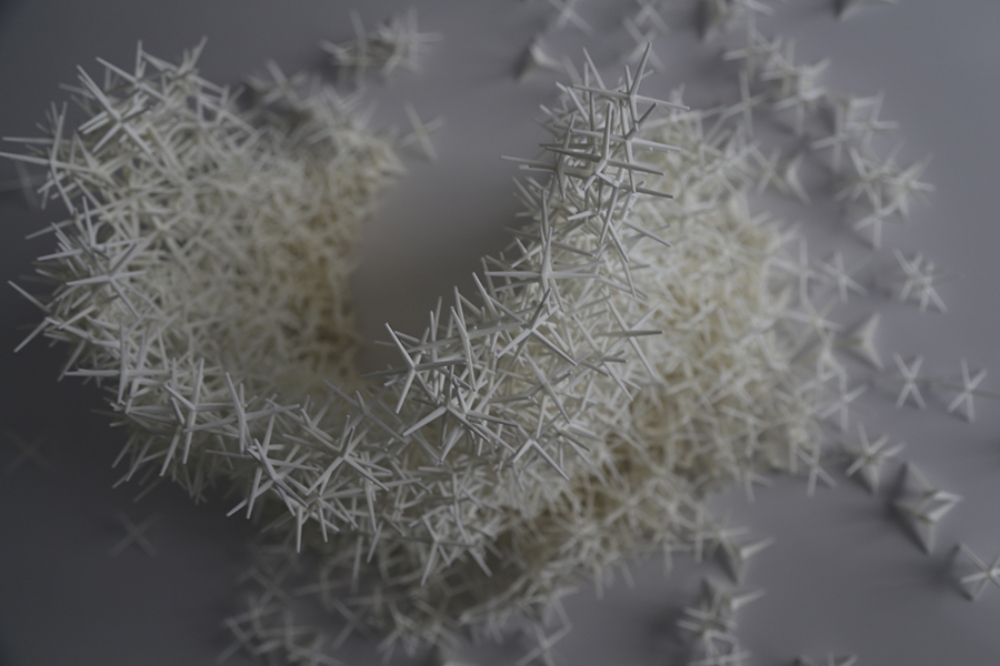
Während eine große Bandbreite möglicher granularer Eigenschaften programmiert werden kann, liegt der Schwerpunkt des ICD Aggregat Pavillons 2015 auf der Erforschung der programmierten Vertikalität – ein Merkmal, das über den natürlichen granularen Schüttwinkel hinausgeht. Darüber hinaus sind die Strukturen funktional gradiert – unter Verwendung von drei verschiedenen Arten von Partikeln, die in verschiedenen Zonen der vertikalen Strukturen eingesetzt werden können, um eine von oben nach unten zunehmende Lastübertragung zu ermöglichen. Das System selbst ist vollständig rekonfigurierbar, da keine permanente Bindungsmatrix verwendet wird.
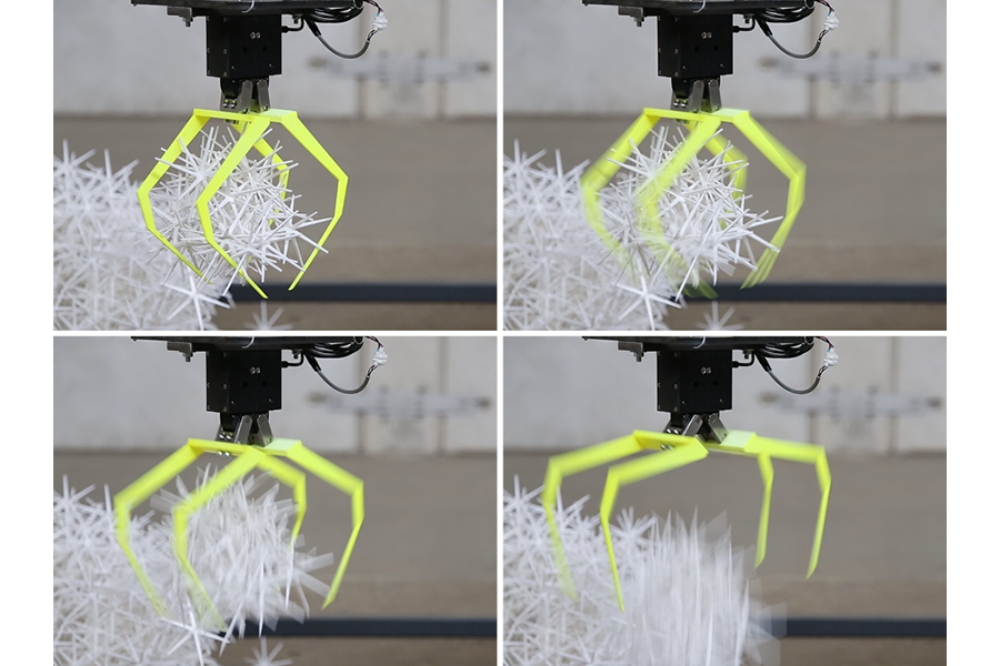
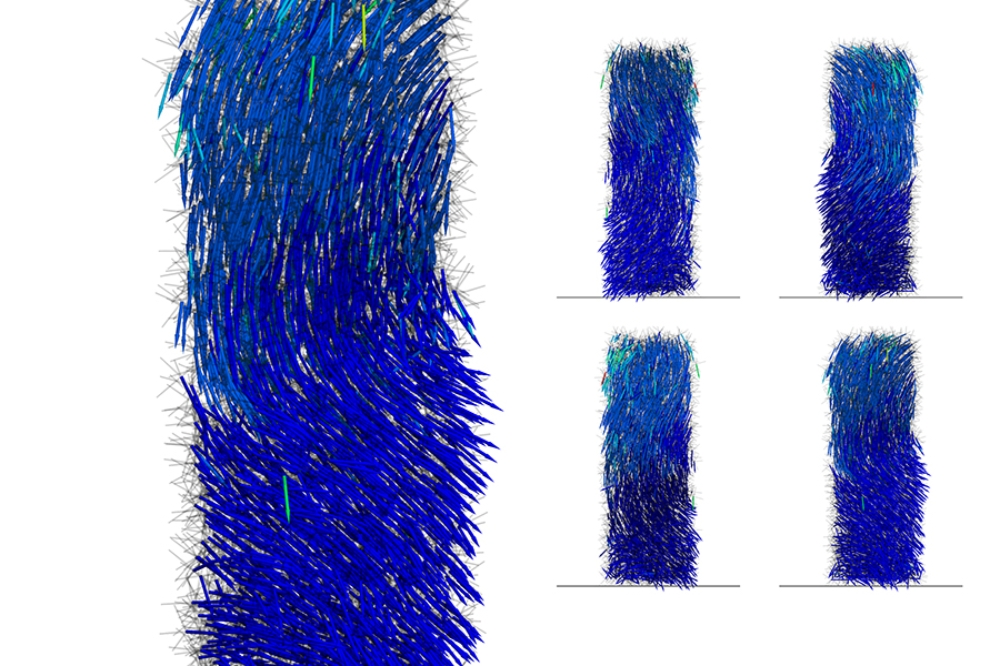
Das Projekt wurde am Institut für Computerbasiertes Entwerfen und Baufertigung (ICD) über einen Zeitraum von einem Jahr entwickelt. Die Strukturen selbst sowie eine Reihe von möglichen Konstruktions- und Gradierungstechniken wurden zunächst anhand von maßstabgetreuen Modellen sowie durch eins-zu-eins Prototypenbau in einer Laborumgebung getestet. Diese wurden durch Simulationen mit der Diskrete-Element Methode (DEM) ergänzt, die sowohl die prädiktive als auch die analytische Modellierung von Partikelsystemen mit sehr hohen Teilchenahlen ermöglichen. Der Seilroboter wurde spezifisch als groß angelegtes Robotersystem konzipiert, das leicht an sich ändernde Standortbedingungen und Abmessungen angepasst werden kann. Nach ersten Testläufen innerhalb eines begrenzten Bauraums wurde das System an den Bauplatz angepasst und an vier umliegenden Bäumen befestigt. Die Kalibrierung vor Ort ermöglichte eine präzise Ablage der granularen Materialien innerhalb des Konstruktionsraumes des Roboters. Auf diese Weise konnten die Strukturen vor Ort konstruiert und wieder abgebaut werden.
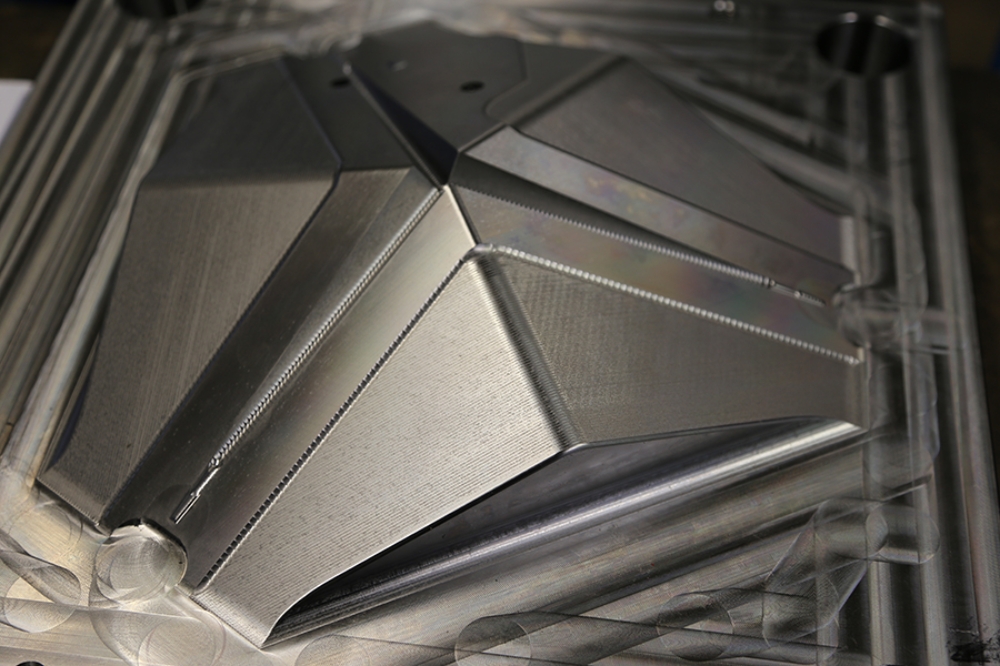
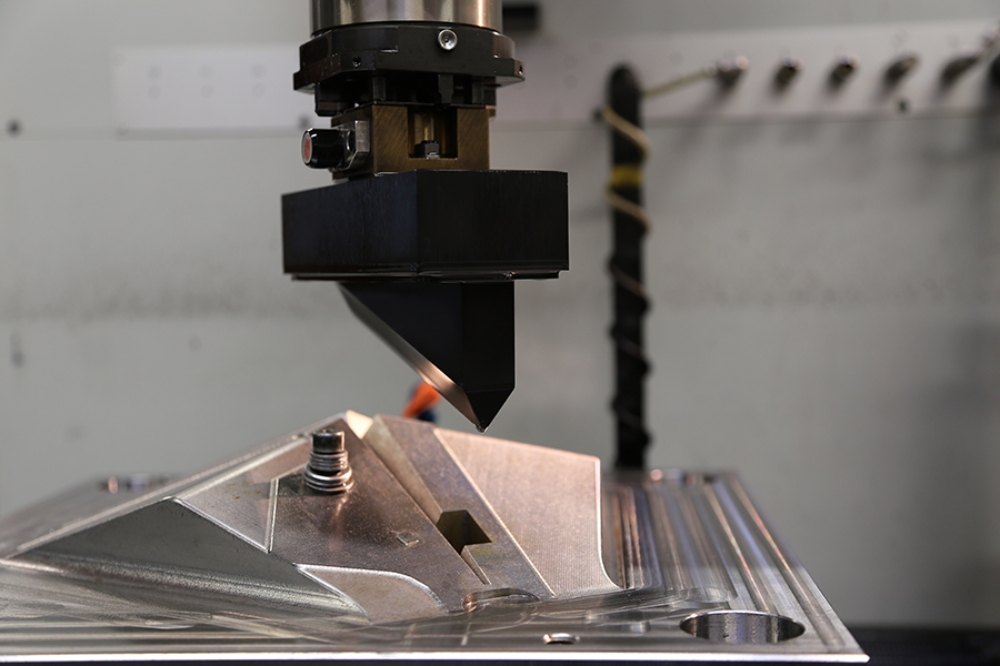
Insgesamt wurden 30 000 Partikel aus recycelten Kunststoffen, die aus der lokalen Industrieproduktion bezogen wurden, im Spritzgussverfahren hergestellt. Zwei bis drei geometrische Partikeltypen, die auf einem gemeinsamen parametrischen Modell basieren, wurden in der Konstruktion verwendet, um den unterschiedlichen strukturellen Anforderungen gerecht zu werden. Die gesamte Struktur wurde in wenigen Stunden errichtet und während der Ausstellungsdauer mehrfach umkonfiguriert. Während des Bauprozesses ist keine Schalung erforderlich. Der Seilroboter kann eine maximale Reichweite von 30 Metern haben, jedoch wurde der Bauraum an diesem speziellen Standort auf etwa sieben mal sieben Meter festgelegt. Er erreicht Genauigkeiten im Bereich von wenigen Zentimetern bei Traglasten von bis zu 10 Kilogramm.
ICD Institut für Computerbasiertes Entwerfen und Baufertigung
Karola Dierichs, Achim Menges
Wissenschaftliche Assistenten
Giulio Brugnaro, Matthias Helmreich, Ondrej Kyjanek, Gergana Rusenova, Emily Scoones, Leyla Yunis
Seil-Robotik
Martin Loucka, Ondrej Kyjanek
Fertigung
Wilhelm Weber GmbH & Co. GMBH & CO. KG
Finanzierung
Holcim Awards for Sustainable Construction
ITASCA Consulting Inc.