
Projektgalerie






{kind=link}
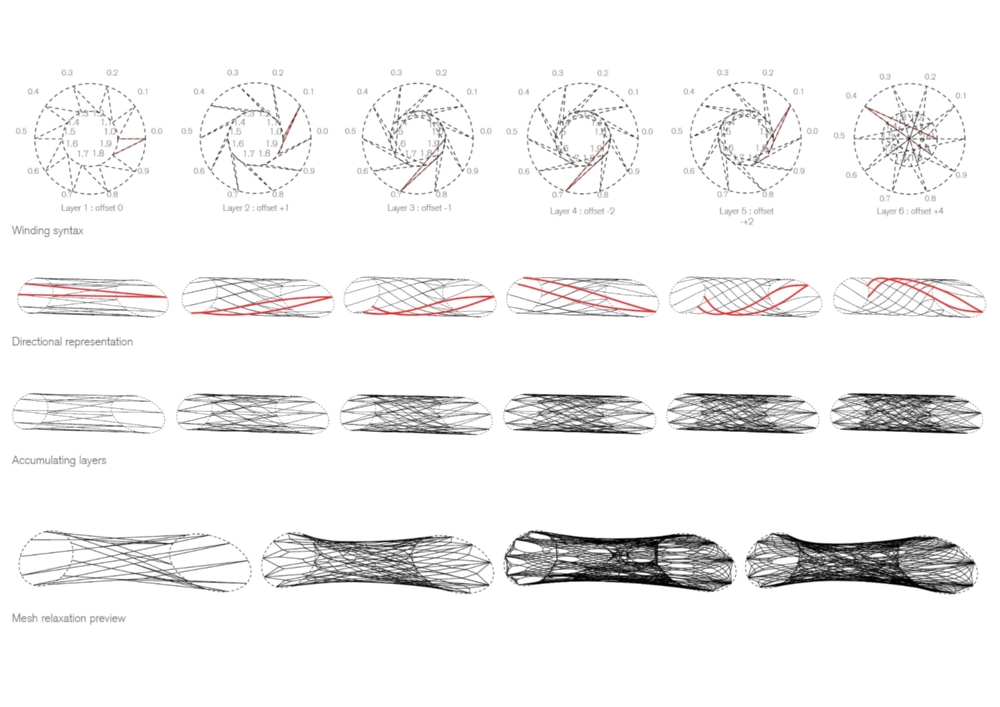
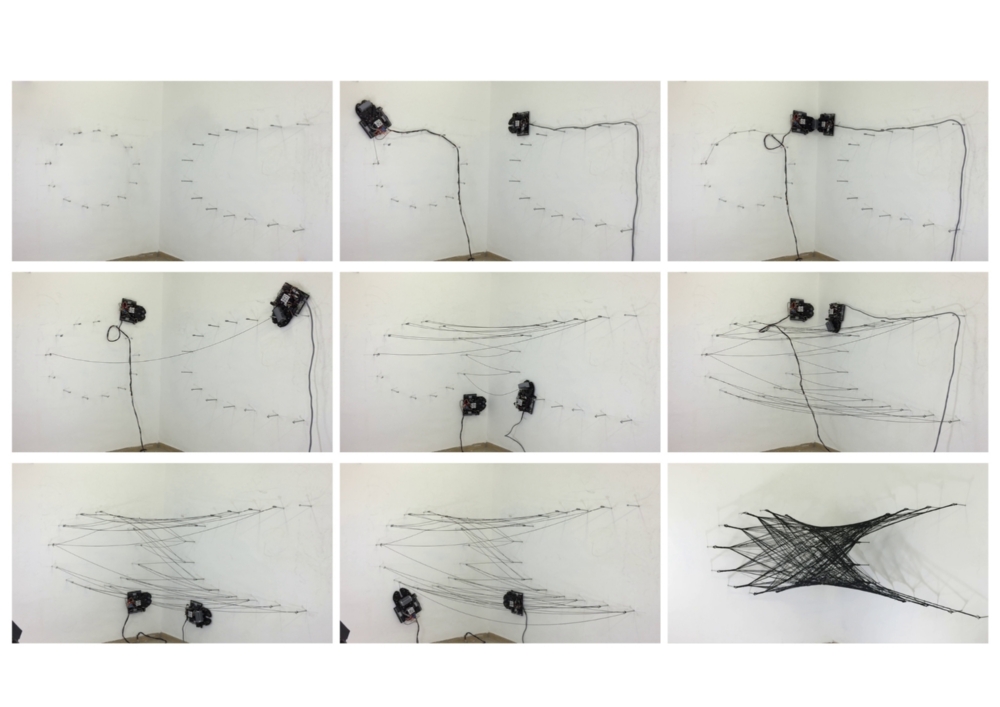
Mobile Robotic Fabrication System for Filament Structures
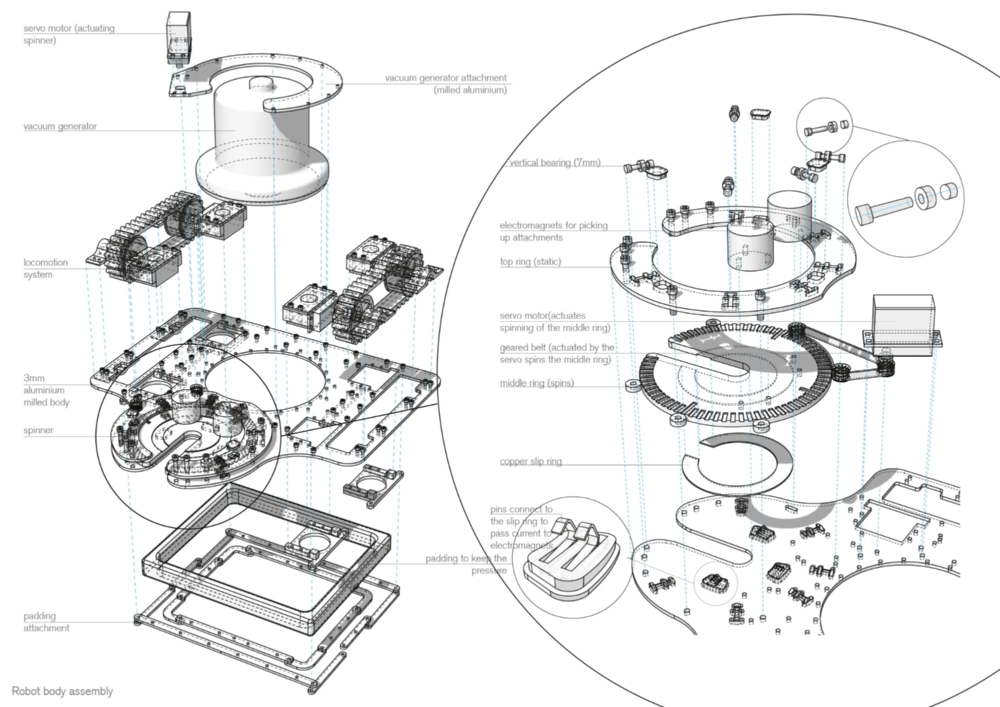
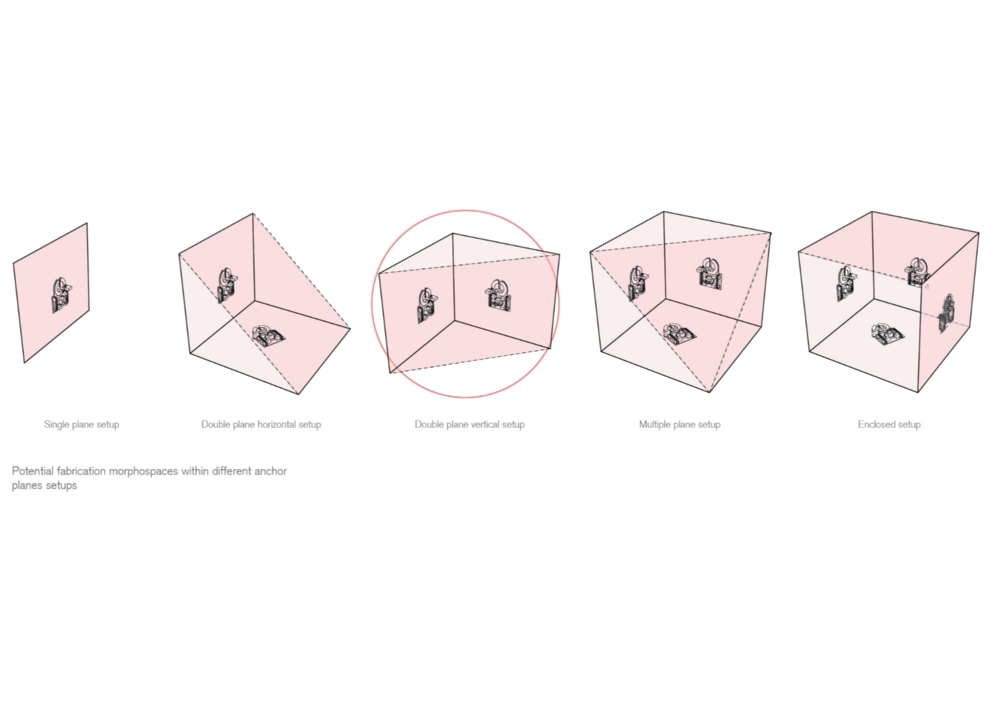
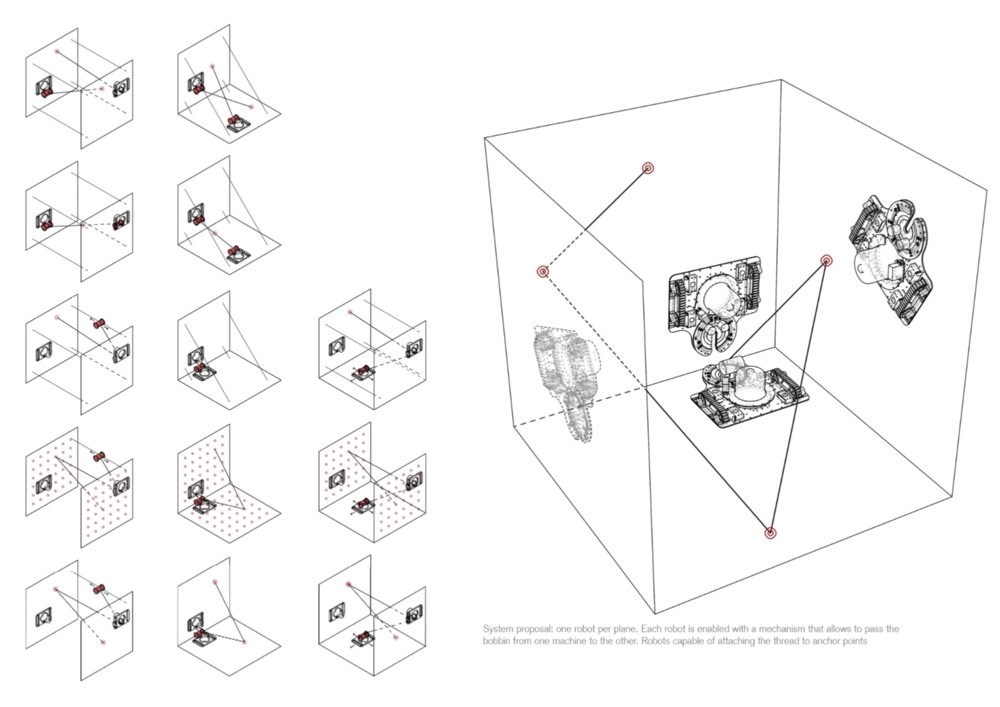
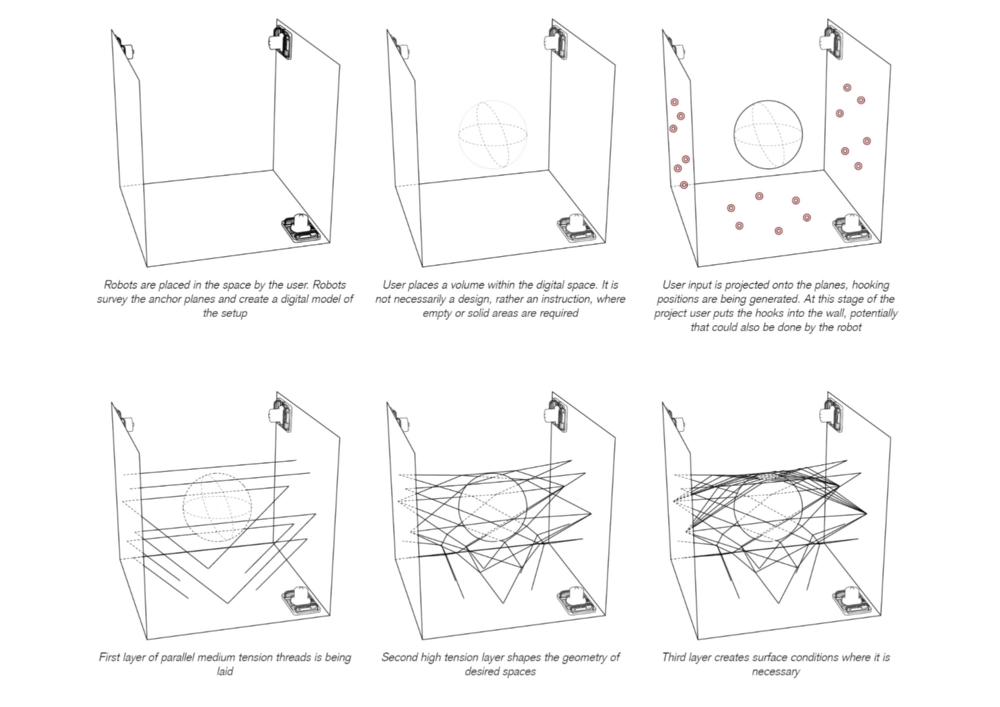
Das Projekt ‚Mobile Robotic Fabrication System for Filament Structures‘, demonstriert ein neues Herstellungsverfahren für Faserstrukturen, basierend auf einer Reihe halbautonomer Wandkletterroboter. Diese sind in der Lage, beliebige horizontale oder vertikale Flächen, sowie auch bestehende Strukturen zu nutzen, um darauf zu navigieren und im Zuge dessen Faserstrukturen zu errichten. Im Vergleich zu Industrierobotern größeren Maßstabs, die in Bezug auf Position und Reichweite begrenzt sind, werden die Roboter dieses Projekts mit Sensor-Aktor Mechanismen ausgestattet, welche diese befähigen, sich präzise entlang von Böden, Wänden, Dächern und Decken zu bewegen. Dadurch kann ein Herstellungsprozess ermöglicht werden, bei dem ein Anwender lediglich mit einem Koffer ausgestattet zu einem Einsatzort kommt, in dem alle erforderlichen Roboter und Baumaterialien zur Errichtung der geplanten Struktur untergebracht sind. Diese sowohl agilen als auch mobilen Robotersysteme erlauben die Ausweitung robotergestützter Fertigungsprozesse von geschlossenen Produktionshallen, hinaus in unsere städtischen und architektonischen Umgebungen.
ITECH M.Sc. These 2015
Maria Yablonina
Tutoren: Ehsan Baharlou, Marshall Prado, Tobias Schwinn
Erstprüfer: Prof. Achim Menges
Zweitprüfer: Prof. Jan Knippers
Das Projekt ‚Mobile Robotic Fabrication System for Filament Structures‘, demonstriert ein neues Herstellungsverfahren für Faserstrukturen, basierend auf einer Reihe halbautonomer Wandkletterroboter. Diese sind in der Lage, beliebige horizontale oder vertikale Flächen, sowie auch bestehende Strukturen zu nutzen, um darauf zu navigieren und im Zuge dessen Faserstrukturen zu errichten. Im Vergleich zu Industrierobotern größeren Maßstabs, die in Bezug auf Position und Reichweite begrenzt sind, werden die Roboter dieses Projekts mit Sensor-Aktor Mechanismen ausgestattet, welche diese befähigen, sich präzise entlang von Böden, Wänden, Dächern und Decken zu bewegen. Dadurch kann ein Herstellungsprozess ermöglicht werden, bei dem ein Anwender lediglich mit einem Koffer ausgestattet zu einem Einsatzort kommt, in dem alle erforderlichen Roboter und Baumaterialien zur Errichtung der geplanten Struktur untergebracht sind. Diese sowohl agilen als auch mobilen Robotersysteme erlauben die Ausweitung robotergestützter Fertigungsprozesse von geschlossenen Produktionshallen, hinaus in unsere städtischen und architektonischen Umgebungen.
ITECH M.Sc. These 2015
Maria Yablonina
Tutoren: Ehsan Baharlou, Marshall Prado, Tobias Schwinn
Erstprüfer: Prof. Achim Menges
Zweitprüfer: Prof. Jan Knippers