
Projektgalerie








Prototyp ausgestellt auf der Ausstellung Creative Robotics 2018, ARS Electronica Center, Linz, Österreich




{kind=link}
Cyber Physical Macro Materials UAV [re]konfigurierbares Architektursystem
Das Projekt Cyber Physical Macro Materials untersucht eine neuartige, agile Architektur für den öffentlichen Raum. Die dynamische und rekonfigurierbare Dachstruktur wird durch eine Kombination aus dezentralen robotischen Prozessen und programmierbarer Makro-Materie ermöglicht. Das cyber-physikalische System besteht aus leichten Bauelementen aus Carbon-Faser mit integrierter Elektronik für Kommunikation und Sensorik, sowie autonomen, unbemannten Fluggeräten, die den (Um)Bauprozess ausführen.
Im Gegensatz zu üblichen, lethargischen Bauprozessen erschließt die physische Flexibilität und integrierte Intelligenz neue architektonische Möglichkeiten für die Anpassungsfähigkeit und Aktivierung öffentlicher Außenräume.
PROJEKTBESCHREIBUNG
Das Project Cyber Physical Macro Materials untersucht eine neuartige, intelligente und agile Architektur für den öffentlichen Raum, in der sowohl computerbasierte Strategien als auch künstliche Intelligenz auf ein dynamisches, anpassungsfähiges, konstruktives System angewandt werden. Eine dynamische und autonom rekonfigurierbare Dachstruktur wird durch eine Kombination aus dezentralen robotischen Prozessen ermöglicht. Das Projekt basiert auf innovativen Leichtbau-Prototypen des ICD/ITKE wie beispielsweise dem Elytra Filament Pavilion, ICD/ITKE research pavilion 2016-17 und Wall climbing robots.
Das cyber-physikalische, architektonische System besteht aus leichten Bauelementen aus Carbon-Fasern mit integrierter Elektronik für Kommunikation und Sensorik, sowie autonomen, unbemannten Fluggeräten, die den (Um)Bauprozess ausführen.
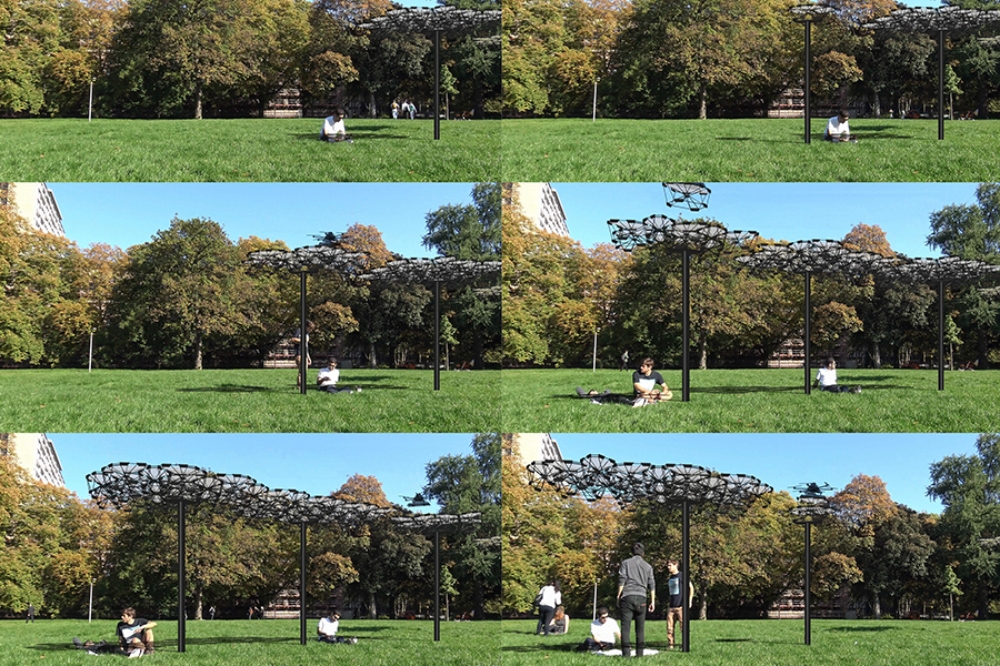
Das System eröffnet völlig neuartige Möglichkeiten für eine anpassungsfähige und intelligente Architektur im öffentlichen Raum. Durch die autonome Rekonfigurierbarkeit kann sich die Dachstruktur kontinuierlich oder in Intervallen mit variabler Geschwindigkeit und ohne zusätzliche Ausrüstung oder Aufwand durch ihre Umgebung „bewegen“, sich in kleinere Unterstrukturen teilen oder vollständig zurückbauen. Im Gegensatz zu üblichen, statischen Gebäuden kann die Dachstruktur zudem mit einem dynamsichen Rekonfigurationsverhalten programmiert werden. Durch das Zusammenspiel der integrierten Sensorik mit Nutzern und Umgebung entsteht so eine neuartige Architektur. Das System kann sich beispielsweise durch den öffentlichen Raum bewegen, die Raum- und Nutzerinformationen sammeln und dann das eigene Rekonfigurationsverhalten auf diese Informationen anpassen. Das System besteht aus: intelligenter, programmierbarer Makro-Materie („cyber-physical building blocks“), unbemannten Fluggeräten („builder“), einem Kommunikations- und Programmierungssystem und den Nutzern. Der Prototyp in Form einer Dachstruktur wurde im Maßstab 1:1 und mit einer Gesamthöhe von 2,50m im öffentlichen Raum in Stuttgart getestet. Zwanzig voll funktionsfähige Bauelemente wurden produziert und zwei unbemannte Fluggeräten wurden eingesetzt, um den autonomem Betrieb in mehreren Flugtests zu testen. Sowohl die Anzahl der Makro-Materie als auch der unbemannten Fluggeräte ist skalierbar, wodurch größere und schnellere Konfigurationen mit ähnlichem Verhalten erreichbar sind. Die strategische Trennung von Makro-Materie und Antrieb/Bewegung schafft ein intelligentes System, in dem nur die für den Dauerbetrieb erforderliche Funktionalität in die Architektur eingebettet ist, während die energie-intensiven Prozesse extern von den mobilen Fluggeräten ausgeführt werden. Diese Faktoren ermöglichen sowohl eine effiziente und schnelle Anpassung des Systems als auch die Beibehaltung einer statischen Konfiguration über längere Zeiträume hinweg.
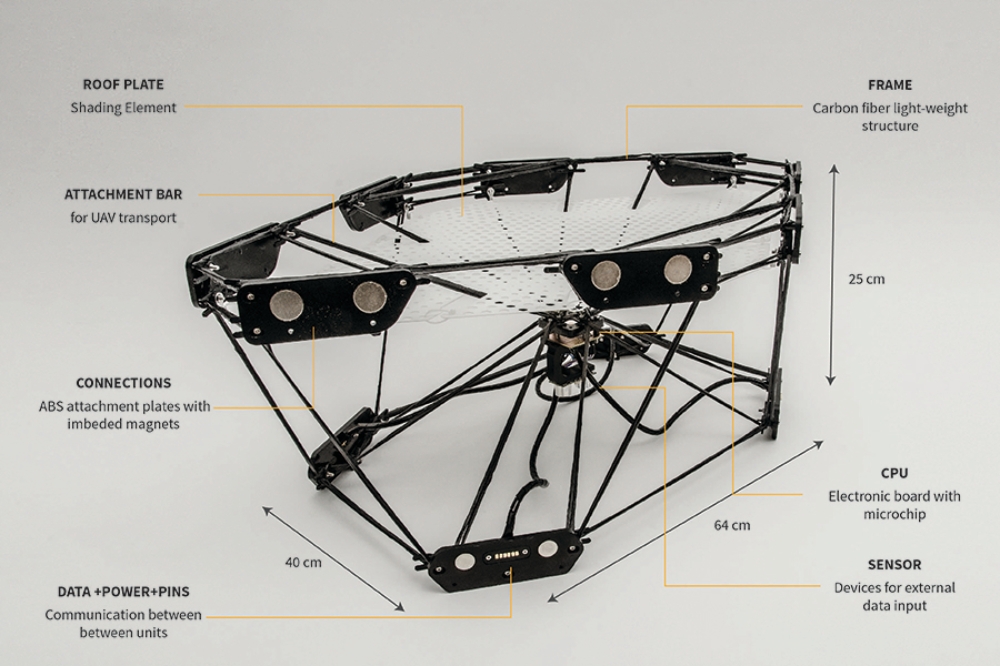
Die wichtigste physische Systemkomponente ist die spezifisch entwickelte, digitale Makro-Materie aus einzelnen, in Serie produzierbaren Moduleinheiten im Makro-Maßstab. Hauptziel des Projekts ist die Rekonfiguierbarkeit; die Moduleinheiten müssen jedoch auch Aspekte wie architektonische Performanz, Transportfähigkeit, Tragfähigkeit, Kosten, Gewicht, Stromverbrauch und Ästhetik berücksichtigen. Darüber hinaus sollen die Moduleinheiten in der Lage sein, sowohl Sensordaten zu sammeln als auch Informationen und Energie an benachbarte Einheiten zu übertragen. Eine Moduleinheit besteht aus einer CFRP-Skelettstruktur (Carbon Fiber Reinforced Plastic = Kohlenstofffaserverstärkter Kunststoff), die einen dreidimensionalen Polyeder-Rahmen (6 Seiten) mit einem Volumen von 0,06m³ und einer Fläche von 0,20m² bildet. An den Oberseiten der vier Eckflächen ist jeweils eine Polykarbonplatte angebracht, die einen geschlossenen Bereich bildet, an denen die Anbindungspunkte zwischen den Moduleinheiten angebracht sind. Die Verwendung von CRFP reduziert das Gewicht der Einheit erheblich und ermöglicht gleichzeitig eine Elementgröße und konstruktive Stabilität, die für eine architektonische Anwendung nötig ist. Das System erreicht ein Flächengewicht von gerade einmal 3,49 kg/m². Zur Verbindung der Moduleinheiten werden Magnete verwendet. Das An-und Abkoppeln der Einheiten kann entlang der offenen Kanten des Systems durch spezifische Bewegungsabläufe des unbemannten Flugobjekts erfolgen. In jeder Fläche ist ein 6-poliger, handelsüblicher Steckverbinder eingebettet, um Daten und Energie zwischen den Moduleinheiten zu übertragen. Eine speziell entwickelte Platine ist in der Mitte montiert.
Die Moduleinheiten werden in einem Faserwickelverfahren ohne Negativform und mit individuellen, im CNC-Fräsverfahren gefertigten Anschlussplatten aus ABS-Kunststoff hergestellt. Die Neodym-Permanentmagnete und Stiftleisten werden in die Aussparungen der Platten eingebettet und bilden die physikalische Kommunikationsverbindung zwischen den Moduleinheiten. 3D gedruckte Wickelhaken werden mit Stiften an den Anschlussplatten befestigt und die fertiggestellten Anschlussplatten werden vorübergehend am äußeren Rahmen befestigt, der die Außenkanten des Elements bildet. Zwischen den Ankerpunkten werden bereits imprägnierte Karbonfasern (12k Roving, Epoxidharz) gewickelt, diese bilden die Streben zwischen den Knoten und dem zentralen Punkt. Nach dem Aushärten wird der Außenrahmen entfernt, die Zusatzelektronik an einer zentralen Anschlussstelle verschraubt und eine schwarze Verkabelung installiert. Das Gewicht wird überprüft und jeder Moduleinheit wird eine elektronische ID-Nummer zugewiesen.
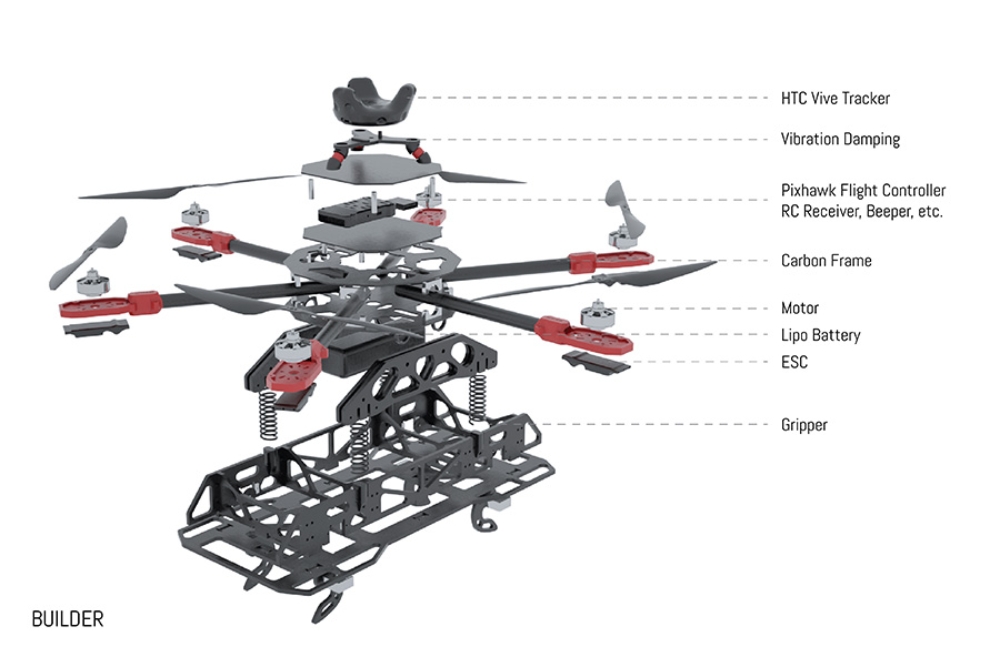
Die Moduleinheiten werden versetzt, indem sie mit den spezifisch für dieses Projekt entwickelten, unbemanntenn Flugobjekten über ein hierarchisches System von über die Moduleinheiten verteilten Prozessoren und eine zentrale Steuereinheit kommunizieren. Basierend auf den im zentralen Prozessor berechneten Anweisungen errechnet das Flugobjekt eine Flugroute und kommuniziert mit bestimmten Einheiten, um sie an einen neuen Ort oder einen Lagerort zu transportieren. Da das System Flexibilität, Erweiterbarkeit und Einsatzfähigkeit in einem großen Freiraum erfordert, wurden unbemannte Flugroboter gewählt. In dem vorgeschlagenen System manipuliert der Flugroboter das System von oben und nimmt dadurch nur einen Raum außerhalb der Reichweite der Nutzer ein. Individuell entwickelte Navigations- und Steuerungssysteme werden speziell für die Lasten und Bewegungen entwickelt, die zum Loslösen, Transportieren und Befestigen der Moduleinheiten erforderlich sind.
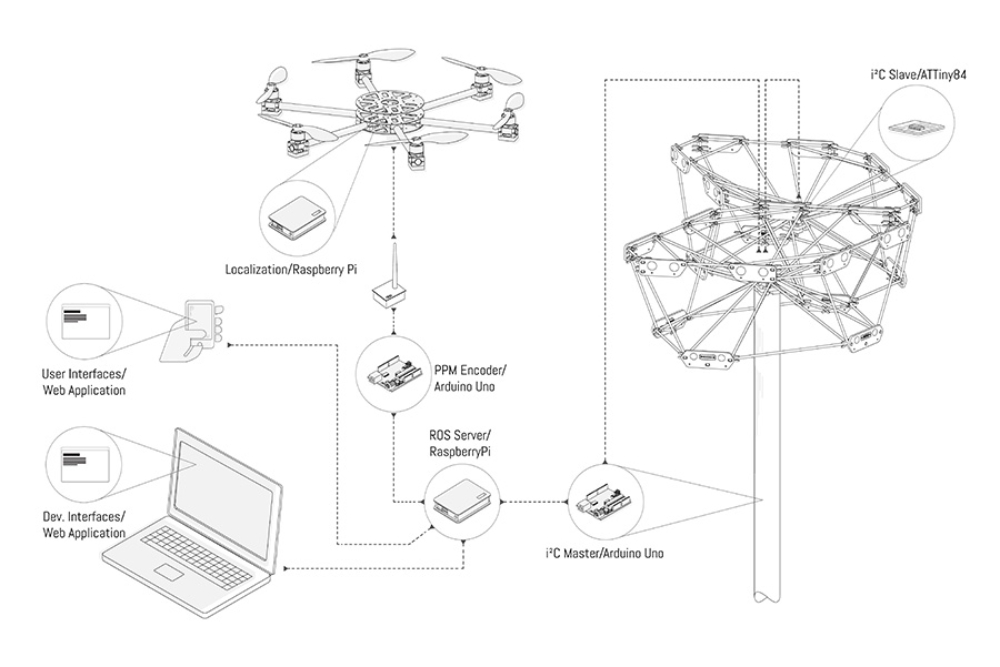
Damit das System funktioniert, interagieren Makro-Material, unbemannter Flugroboter und Nutzer über die Hardware und Software. Die einzelnen Softwareebenen reichen vom einfachen Kommunikationsprotokoll bis zu High-Level-Algorithmen und wurden individuell entwickelt, um die Kommunikation und Skalierbarkeit des Systems zu ermöglichen und die jeden Agenten auf Basis der gesammelten Informationen koordinieren. Die Kommunikation zwischen den Moduleinheiten erfolgt über einen I²C-Bus und werden über eine serielle Schnittstelle an einen Server gesendet. Von dort werden die Nachrichten über Protokolle wie WebSocket und UDP, die auf den Nutzeranforderungen basieren, sowohl an andere Agenten als auch an die unbemannten Flugobjekte („builder) gesendet.
Diese Datenerfassung und die Rekonfiguration der Dachstruktur kann eine große Menge an Rohdaten liefern, um die verborgenen Wechselbeziehungen zwischen den Nutzern, der Umgebung, dem Raum und dem architektonischen System zu untersuchen. Das Verhalten der Nutzer lässt sich nicht als lineare Beziehung mit einer begrenzten Anzahl an Parametern erklären. Sowohl durch den Zugriff auf eine ausreichende Datenmenge als auch eine ausgefeilte statistische Analyse dieser Daten können Nutzerbewegungen auf Basis früherer Interaktionen abgebildet und sogar manipuliert werden. Im Anschluss an diese Phase würde das System beginnen, ein eigenes Verhalten zu entwickeln und dieses gleichzeitig auf Grundlage neuer Daten zu verfeinern. Ziel dieses Modus ist es, aus diesen Daten den Erfolg (Fitnesswert) der aktuellen Konfiguration zu bestimmen. Fitness könnte dadurch beschrieben werden, dass Nutzer an eine bestimmte Position geführt werden können, die Anordnung der Nutzer könnte als Kennzeichnung der Datenbankeinträge interpretiert werden und der Rest der Parameter könnte als Merkmal betrachtet werden. Ein Klassifikationsbaum könnte die beste Anordnung der Nutzer auf Basis aller Parameter generieren. Während einer ersten Datenerfassungs-Phase kann sich das System frei bewegen oder ausbreiten, um vorab Informationen zu sammeln.
Innerhalb des für das System entwickelten physischen und digitalen Rahmens können verschiedene Programmstrategien konzipiert werden. Hierfür werden drei Strategien beschreiben, um die Möglichkeiten des Systems in der Architektur aufzuzeigen. Die interessanteste Strategie ist das „Lernverhalten“. Das Lernverhalten ermöglicht es dem architektonischen System, durch das Erproben verschiedener Konfigurationsmuster kontinuierlich neue Verhaltensweise auszubilden und durch maschinelles Lernen daraus eine übergeordnete „Intelligenz“ auszubilden.
Durch seine Fähigkeit, sich kontinuierlich zu rekonstruieren stellt das System etablierte Ideen der digitalen robotischen (Vor-)Fertigung in der Architektur in Frage. Man kann sich eine agile und dynamische Dachstruktur vorstellen, die sich autonom im öffentlichen Raum bewegt, die auf den Nutzer reagiert, sich aktiv umbaut, oder sich zeitweise auf nahegelegene Dächer zurückzieht. Im Gegensatz zu den üblichen, lethargischen Bauprozessen erschließt die physische Flexibilität und integrierte Intelligenz neue architektonische Möglichkeiten für die Anpassungsfähigkeit und Aktivierung öffentlicher Außenräume und führt zu neuartigen Verhaltensmuster und Interaktionen. Die Struktur kann so irgendwann in der Lage sein, nicht nur durch ihre Nutzer zu lernen, sondern auch im Raum nach Informationen und Einflüssen zu suchen. Das System bildet die Grundlage für eine räumliche und architektonische Anwendung maschinellen Lernens und künstlicher Intelligenz.
ITECH M.SC. THESE
Miguel Aflalo, Jingcheng Chen, Behrooz Tahanzadeh
Tutoren: Dylan Wood, Maria Yablonina
Supervisor: Prof. Achim Menges
Zweiter Supervisor: Prof. Jan Knippers
Das Projekt Cyber Physical Macro Materials untersucht eine neuartige, agile Architektur für den öffentlichen Raum. Die dynamische und rekonfigurierbare Dachstruktur wird durch eine Kombination aus dezentralen robotischen Prozessen und programmierbarer Makro-Materie ermöglicht. Das cyber-physikalische System besteht aus leichten Bauelementen aus Carbon-Faser mit integrierter Elektronik für Kommunikation und Sensorik, sowie autonomen, unbemannten Fluggeräten, die den (Um)Bauprozess ausführen.
Im Gegensatz zu üblichen, lethargischen Bauprozessen erschließt die physische Flexibilität und integrierte Intelligenz neue architektonische Möglichkeiten für die Anpassungsfähigkeit und Aktivierung öffentlicher Außenräume.
PROJEKTBESCHREIBUNG
Das Project Cyber Physical Macro Materials untersucht eine neuartige, intelligente und agile Architektur für den öffentlichen Raum, in der sowohl computerbasierte Strategien als auch künstliche Intelligenz auf ein dynamisches, anpassungsfähiges, konstruktives System angewandt werden. Eine dynamische und autonom rekonfigurierbare Dachstruktur wird durch eine Kombination aus dezentralen robotischen Prozessen ermöglicht. Das Projekt basiert auf innovativen Leichtbau-Prototypen des ICD/ITKE wie beispielsweise dem Elytra Filament Pavilion, ICD/ITKE research pavilion 2016-17 und Wall climbing robots.
Das cyber-physikalische, architektonische System besteht aus leichten Bauelementen aus Carbon-Fasern mit integrierter Elektronik für Kommunikation und Sensorik, sowie autonomen, unbemannten Fluggeräten, die den (Um)Bauprozess ausführen.
Das System eröffnet völlig neuartige Möglichkeiten für eine anpassungsfähige und intelligente Architektur im öffentlichen Raum. Durch die autonome Rekonfigurierbarkeit kann sich die Dachstruktur kontinuierlich oder in Intervallen mit variabler Geschwindigkeit und ohne zusätzliche Ausrüstung oder Aufwand durch ihre Umgebung „bewegen“, sich in kleinere Unterstrukturen teilen oder vollständig zurückbauen. Im Gegensatz zu üblichen, statischen Gebäuden kann die Dachstruktur zudem mit einem dynamsichen Rekonfigurationsverhalten programmiert werden. Durch das Zusammenspiel der integrierten Sensorik mit Nutzern und Umgebung entsteht so eine neuartige Architektur. Das System kann sich beispielsweise durch den öffentlichen Raum bewegen, die Raum- und Nutzerinformationen sammeln und dann das eigene Rekonfigurationsverhalten auf diese Informationen anpassen. Das System besteht aus: intelligenter, programmierbarer Makro-Materie („cyber-physical building blocks“), unbemannten Fluggeräten („builder“), einem Kommunikations- und Programmierungssystem und den Nutzern. Der Prototyp in Form einer Dachstruktur wurde im Maßstab 1:1 und mit einer Gesamthöhe von 2,50m im öffentlichen Raum in Stuttgart getestet. Zwanzig voll funktionsfähige Bauelemente wurden produziert und zwei unbemannte Fluggeräten wurden eingesetzt, um den autonomem Betrieb in mehreren Flugtests zu testen. Sowohl die Anzahl der Makro-Materie als auch der unbemannten Fluggeräte ist skalierbar, wodurch größere und schnellere Konfigurationen mit ähnlichem Verhalten erreichbar sind. Die strategische Trennung von Makro-Materie und Antrieb/Bewegung schafft ein intelligentes System, in dem nur die für den Dauerbetrieb erforderliche Funktionalität in die Architektur eingebettet ist, während die energie-intensiven Prozesse extern von den mobilen Fluggeräten ausgeführt werden. Diese Faktoren ermöglichen sowohl eine effiziente und schnelle Anpassung des Systems als auch die Beibehaltung einer statischen Konfiguration über längere Zeiträume hinweg.
Die wichtigste physische Systemkomponente ist die spezifisch entwickelte, digitale Makro-Materie aus einzelnen, in Serie produzierbaren Moduleinheiten im Makro-Maßstab. Hauptziel des Projekts ist die Rekonfiguierbarkeit; die Moduleinheiten müssen jedoch auch Aspekte wie architektonische Performanz, Transportfähigkeit, Tragfähigkeit, Kosten, Gewicht, Stromverbrauch und Ästhetik berücksichtigen. Darüber hinaus sollen die Moduleinheiten in der Lage sein, sowohl Sensordaten zu sammeln als auch Informationen und Energie an benachbarte Einheiten zu übertragen. Eine Moduleinheit besteht aus einer CFRP-Skelettstruktur (Carbon Fiber Reinforced Plastic = Kohlenstofffaserverstärkter Kunststoff), die einen dreidimensionalen Polyeder-Rahmen (6 Seiten) mit einem Volumen von 0,06m³ und einer Fläche von 0,20m² bildet. An den Oberseiten der vier Eckflächen ist jeweils eine Polykarbonplatte angebracht, die einen geschlossenen Bereich bildet, an denen die Anbindungspunkte zwischen den Moduleinheiten angebracht sind. Die Verwendung von CRFP reduziert das Gewicht der Einheit erheblich und ermöglicht gleichzeitig eine Elementgröße und konstruktive Stabilität, die für eine architektonische Anwendung nötig ist. Das System erreicht ein Flächengewicht von gerade einmal 3,49 kg/m². Zur Verbindung der Moduleinheiten werden Magnete verwendet. Das An-und Abkoppeln der Einheiten kann entlang der offenen Kanten des Systems durch spezifische Bewegungsabläufe des unbemannten Flugobjekts erfolgen. In jeder Fläche ist ein 6-poliger, handelsüblicher Steckverbinder eingebettet, um Daten und Energie zwischen den Moduleinheiten zu übertragen. Eine speziell entwickelte Platine ist in der Mitte montiert.
Die Moduleinheiten werden in einem Faserwickelverfahren ohne Negativform und mit individuellen, im CNC-Fräsverfahren gefertigten Anschlussplatten aus ABS-Kunststoff hergestellt. Die Neodym-Permanentmagnete und Stiftleisten werden in die Aussparungen der Platten eingebettet und bilden die physikalische Kommunikationsverbindung zwischen den Moduleinheiten. 3D gedruckte Wickelhaken werden mit Stiften an den Anschlussplatten befestigt und die fertiggestellten Anschlussplatten werden vorübergehend am äußeren Rahmen befestigt, der die Außenkanten des Elements bildet. Zwischen den Ankerpunkten werden bereits imprägnierte Karbonfasern (12k Roving, Epoxidharz) gewickelt, diese bilden die Streben zwischen den Knoten und dem zentralen Punkt. Nach dem Aushärten wird der Außenrahmen entfernt, die Zusatzelektronik an einer zentralen Anschlussstelle verschraubt und eine schwarze Verkabelung installiert. Das Gewicht wird überprüft und jeder Moduleinheit wird eine elektronische ID-Nummer zugewiesen.
Die Moduleinheiten werden versetzt, indem sie mit den spezifisch für dieses Projekt entwickelten, unbemanntenn Flugobjekten über ein hierarchisches System von über die Moduleinheiten verteilten Prozessoren und eine zentrale Steuereinheit kommunizieren. Basierend auf den im zentralen Prozessor berechneten Anweisungen errechnet das Flugobjekt eine Flugroute und kommuniziert mit bestimmten Einheiten, um sie an einen neuen Ort oder einen Lagerort zu transportieren. Da das System Flexibilität, Erweiterbarkeit und Einsatzfähigkeit in einem großen Freiraum erfordert, wurden unbemannte Flugroboter gewählt. In dem vorgeschlagenen System manipuliert der Flugroboter das System von oben und nimmt dadurch nur einen Raum außerhalb der Reichweite der Nutzer ein. Individuell entwickelte Navigations- und Steuerungssysteme werden speziell für die Lasten und Bewegungen entwickelt, die zum Loslösen, Transportieren und Befestigen der Moduleinheiten erforderlich sind.
Damit das System funktioniert, interagieren Makro-Material, unbemannter Flugroboter und Nutzer über die Hardware und Software. Die einzelnen Softwareebenen reichen vom einfachen Kommunikationsprotokoll bis zu High-Level-Algorithmen und wurden individuell entwickelt, um die Kommunikation und Skalierbarkeit des Systems zu ermöglichen und die jeden Agenten auf Basis der gesammelten Informationen koordinieren. Die Kommunikation zwischen den Moduleinheiten erfolgt über einen I²C-Bus und werden über eine serielle Schnittstelle an einen Server gesendet. Von dort werden die Nachrichten über Protokolle wie WebSocket und UDP, die auf den Nutzeranforderungen basieren, sowohl an andere Agenten als auch an die unbemannten Flugobjekte („builder) gesendet.
Diese Datenerfassung und die Rekonfiguration der Dachstruktur kann eine große Menge an Rohdaten liefern, um die verborgenen Wechselbeziehungen zwischen den Nutzern, der Umgebung, dem Raum und dem architektonischen System zu untersuchen. Das Verhalten der Nutzer lässt sich nicht als lineare Beziehung mit einer begrenzten Anzahl an Parametern erklären. Sowohl durch den Zugriff auf eine ausreichende Datenmenge als auch eine ausgefeilte statistische Analyse dieser Daten können Nutzerbewegungen auf Basis früherer Interaktionen abgebildet und sogar manipuliert werden. Im Anschluss an diese Phase würde das System beginnen, ein eigenes Verhalten zu entwickeln und dieses gleichzeitig auf Grundlage neuer Daten zu verfeinern. Ziel dieses Modus ist es, aus diesen Daten den Erfolg (Fitnesswert) der aktuellen Konfiguration zu bestimmen. Fitness könnte dadurch beschrieben werden, dass Nutzer an eine bestimmte Position geführt werden können, die Anordnung der Nutzer könnte als Kennzeichnung der Datenbankeinträge interpretiert werden und der Rest der Parameter könnte als Merkmal betrachtet werden. Ein Klassifikationsbaum könnte die beste Anordnung der Nutzer auf Basis aller Parameter generieren. Während einer ersten Datenerfassungs-Phase kann sich das System frei bewegen oder ausbreiten, um vorab Informationen zu sammeln.
Innerhalb des für das System entwickelten physischen und digitalen Rahmens können verschiedene Programmstrategien konzipiert werden. Hierfür werden drei Strategien beschreiben, um die Möglichkeiten des Systems in der Architektur aufzuzeigen. Die interessanteste Strategie ist das „Lernverhalten“. Das Lernverhalten ermöglicht es dem architektonischen System, durch das Erproben verschiedener Konfigurationsmuster kontinuierlich neue Verhaltensweise auszubilden und durch maschinelles Lernen daraus eine übergeordnete „Intelligenz“ auszubilden.
Durch seine Fähigkeit, sich kontinuierlich zu rekonstruieren stellt das System etablierte Ideen der digitalen robotischen (Vor-)Fertigung in der Architektur in Frage. Man kann sich eine agile und dynamische Dachstruktur vorstellen, die sich autonom im öffentlichen Raum bewegt, die auf den Nutzer reagiert, sich aktiv umbaut, oder sich zeitweise auf nahegelegene Dächer zurückzieht. Im Gegensatz zu den üblichen, lethargischen Bauprozessen erschließt die physische Flexibilität und integrierte Intelligenz neue architektonische Möglichkeiten für die Anpassungsfähigkeit und Aktivierung öffentlicher Außenräume und führt zu neuartigen Verhaltensmuster und Interaktionen. Die Struktur kann so irgendwann in der Lage sein, nicht nur durch ihre Nutzer zu lernen, sondern auch im Raum nach Informationen und Einflüssen zu suchen. Das System bildet die Grundlage für eine räumliche und architektonische Anwendung maschinellen Lernens und künstlicher Intelligenz.
ITECH M.SC. THESE
Miguel Aflalo, Jingcheng Chen, Behrooz Tahanzadeh
Tutoren: Dylan Wood, Maria Yablonina
Supervisor: Prof. Achim Menges
Zweiter Supervisor: Prof. Jan Knippers