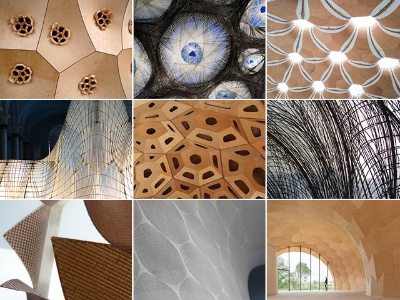
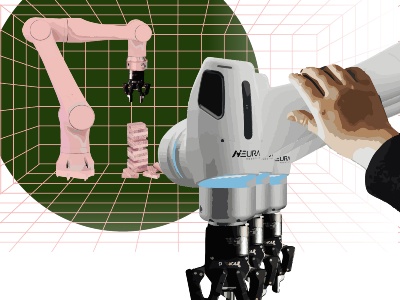
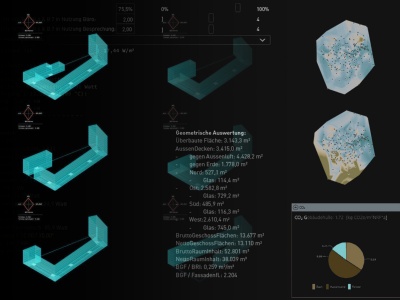
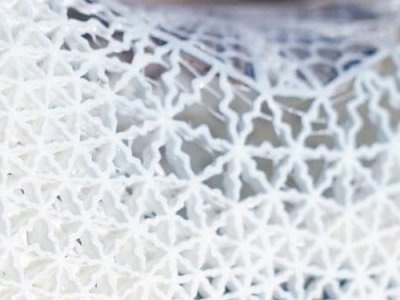
The ICD is actively engaged in basic and applied research through individual projects, collaborative research centers, and the Excellence Cluster IntCDC.
[Photos: 1-7: n/s, 8: https://amaltea-project.eu/, 9-25: n/s]