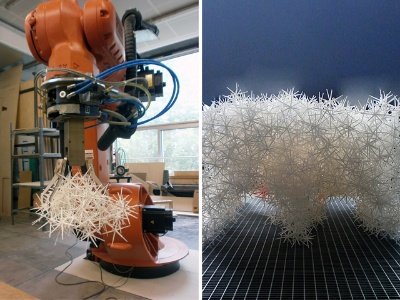
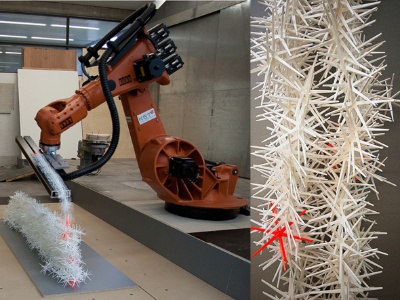
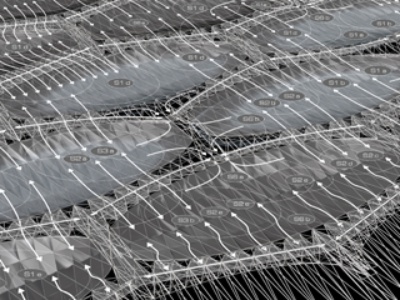
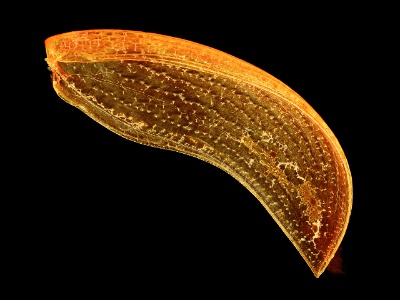
Overview of the seminars taught by ICD at the University of Stuttgart.
[Photos: 1: , 2: , 3: , 4-10: n/s, 11: , 12-16: n/s, 17: , 18-110: n/s]